Building a PC from parts includes keeping cooling in mind. It started out very simple: every cooling fan had two wires, one red and one black. Put +12V on the red wire, connect black go ground, done. Then things got more complex. Earlier I poked around with a fan that had a third wire, which proved to be a tachometer wire for reading current fan speed. The obvious follow-up is to examine cooling fans with four wires. I first saw this with CPU cooling fans and, as a PC builder, all I had to know was how to plug it in the correct orientation. But now as an electronics tinkerer I want to know more details about what those wires do.
A little research found the four-wire fan system was something Intel devised. Several sources cited URLs on http://FormFactors.org which redirects to Intel’s documentation site. Annoyingly, Intel does not make the files publicly available, blocking it with a registered login screen. I registered for a free account, and it still denied me access. (The checkmark next to the user icon means I’ve registered and signed in.)
Quite unsatisfying. But even if I can’t get the document from official source, there are unofficial copies floating around on the web. I found one such copy, which I am not going to link to because the site liberally slathered the PDF with advertisements and that annoys me. Here is the information on the title page which will help you find your own copy. Perhaps even a more updated revision!
Reading through the specification, I learned that the four-wire standard is backwards compatible with three-wire fans as those three wires are the same: GND, +12V supply, and tachometer output. The new wire is for a PWM control signal input. Superficially, this seems very similar to controlling fan speed by PWM modulating the +12V supply, except now the power supply stays fixed at +12V and the PWM MOSFET is built into the fan. How is this better? What real-world problems are solved by using an internal PWM MOSFET? The spec did not explain.
According to spec, the PWM control signal should be running at 25kHz. Fan manufacturers can specify a minimum duty cycle. Fan speed for duty cycle less than the minimum is open for interpretation by different implementations. Some choose to ignore lower duty cycles and stay running at minimum, some interpret it as a shutoff signal. The spec forbids pull-up or pull-down resistor on the PWM signal line external to the fan, but internal to the fan there is a pull-up resistor. I interpret this to mean that if the PWM line is left floating, it will be pulled up to emulate 100% duty cycle PWM.
Reading the specification gave me the theory of operation for this system, now it’s time to play with some of these fans to see how they behave in practice.
I tried to revive a FormLabs Form 1+ resin printer that had been sitting unused for years, but the test print was a failure. Comparing against videos on YouTube showing a Form 1/1+ in action, I noticed two differences. First, the resin vat tilting action (to peel it off a print between layers) was not happening. And more seriously, the laser beam was not moving around to trace out the shape. Instead, it stayed focused on one spot solidifying resin and damaging the resin vat at that point. There are four mechanical actuators on this device: the vat tilt stepper motor, X/Y-axis galvanometers (shortened below to galvos), and the Z-axis stepper motor. Out of four, three aren’t working! Quite disappointing, but at least they should be electromechanical issues that I have a better chance of fixing than software issues. I’ll take it apart and look around.
My disassembly was guided by Bunny Studios’ Form 1 teardown blog post from almost ten years ago. I was glad for the reference, but as the blog post pointed out, FormLabs designed the machine for easy disassembly, inspection, and repair. All fasteners are easily accessible and use the same 2.5mm hex key.
Once I got to remove the back panel, majority of control circuitry became accessible. Only one circuit board is not visible in this picture, as it is mounted in the front for power button and screen.
The large horizontal circuit board has a power-handling section to the right, as indicated by the presence of many transistors, diodes, and inductors. To the left is the brain, including a SanDisk 4GB SD card that wasn’t accessible until the back panel was removed. The smaller vertical circuit board on the right is dedicated to X/Y position control, judging by cables connecting it to the X/Y galvos.
This printer had been shipped around without its original packaging materials, so I had hoped the problem was as easy as a loose connector I could plug back in. Thus my attention was immediately drawn to headers on these circuit board without a wire, but there were no candidate loose wires to plug into those headers. Apparently FormLabs has intentionally chosen not to use those connections, likely related to changes from original Form 1 to this Form 1+.
One of the unused connectors was labeled GALVO Y POWER. I see cables on GALVO Y SIGNAL and GALVO X SIGNAL as well as GALVO X POWER. I guess both galvos are powered from GALVO X POWER cable. This might be relevant to what I find later.
Disappointed that I didn’t find a loose connector I could plug back in or any other obvious easy-to-fix problems, I proceeded to unplug and reinstall every connector to reseat them. Working from left-to-right, everything looked and felt fine until I unplugged the right-most galvo connector. Once it was removed, I got a clear view of the galvo power connector below it.
Discoloration from overheating and possibly soot from a small fire. The toasty connector is the other end of GALVO X POWER. I don’t know enough about this device to say sharing X and Y galvo power from a single connector caused the failure, but it certainly looks suspicious.
I saw no obvious places where GALVO Y POWER could have connected to this galvo control board. I guess it is a later revision that integrated both galvo controls on a single board powered by a single cable. Compare this to Bunny’s earlier device, where we see two separate and seemingly identical galvo control boards, one for X and one for Y, each with their own power and signal cables.
This device is long out of warranty, and official support ended in 2017. I don’t expect FormLabs to have a replacement galvo control board for this Form 1+, but it wouldn’t hurt to ask and see what they say.
I had been given a FormLabs Form 1+ resin printer that’s been sitting unused for years and requested to get it back up and running. Working with FormLabs equipment isn’t cheap, and this “free as-is” printer required nearly $300 of stuff just so I could see if it even runs. With the hardware in hand, I moved on to the software side of things.
All FormLabs equipment require their PreForm software to run, and the current version (3.25.2 as of writing) no longer supports the Form 1+. I dug through FormLabs support to find this page Using PreForm with the Form 1+ which provides a link to download PreForm 2.20. That was the final release before PreForm dropped support for this old printer. PreForm 2.20 is also available for download from the page listing PreForm versions and their equipment compatibility. If someone wants to go even older because they have a need for 32-bit edition, PreForm 2.16.0 was the final 32-bit release and available on that same page.
Installing and launching PreForm activated an introduction to the software, which guides us through printing the FormLabs test object: a (hair?) clip in the shape of FormLabs butterfly logo. I followed through the tutorial to properly orient the shape and generate supports. I installed the Form 1+ compatible aftermarket resin vat from Z-Vat industries, and poured in Form 1+ compatible aftermarket resin from ApplyLabWork. I hit print and started hearing the buzzing of the Z-axis stepper motor. A good sign! Given the upside-down printing nature of resin printers, the metal printing platform blocked my view of what it was doing. I left the machine alone to do its thing.
Roughly half an hour later, the print height has risen enough I could see between the print platform and the vat. I had hoped to see a sturdy print raft forming the foundation of my test clip, but I saw only a lumpy misshapen blob. This is not good.
Watching the machine work, I could see the laser illuminated only a single spot instead of sweeping through the shape as I had expected. I didn’t see movement from the resin vat, either, which was supposed to move as part of peeling process between layers.
After I cancelled the print job, the build platform was raised to its maximum height where I can confirm the misshapen blob. This is definitely not the intended test clip object. It isn’t even in the right place. The test clip was supposed to be close to the peeling hinge edge. (Right side edge in picture above.)
The unmoving laser beam is what hardened the blob. It also hardened various bits of resin which are now floating amongst still-liquid resin. I drained all of that contaminated resin into a disposal container that I will leave out in direct sunlight to harden. Wiping the resin vat clean of residue, I see a hole burned in the precious PDMS layer.
The good news is that all the aftermarket hardware I bought for this printer worked: the aftermarket AC power supply brick seemed to deliver enough power, the aftermarket resin hardened in response to the laser, and the aftermarket resin vat’s PDMS layer allowed the hardened resin to separate between layers. That’s great! But there is something wrong with the printer itself and I’ll take it apart to look for hints.
This FormLabs Form 1+ resin printer was purchased as part of a company’s R&D project. Presumably sometime between June 2014 when Form 1+ was released, and September 2015 when Form 2 launched. It printed a few things and sat neglected since. Recently it came into my possession in “AS-IS” condition delivered by someone several steps removed from that R&D project. The people in that project has since departed, and all he knew was that “something was wrong with it”. If I could produce satisfactory results from this printer, they may subcontract me to print some parts for them and earn an operator’s fee to run this machine that used to be theirs. If I fail, they’ll still be happy because it’s no longer uselessly taking up space gathering dust at their facility.
When this agreement was reached, the machine still had a resin vat that held resin left from its last print. Neither vat nor resin would be any use after several years of neglect. That plus the high probability of making a sticky resin mess meant they were disposed instead of shipped. I was not given the power adapter, either. During the years it sat unused, it had been moved from one workbench to another and became separated from its original AC power adapter.
Fortunately, FormLabs had the foresight to clearly specify power requirements right next to the power socket. I have several 24V DC adapters on hand, but none as high as 2.5A. The best on hand is a 1.5A unit, which I bought for the Neato vacuum charging experiment. I put the correct size barrel connector (5.5mm OD, 2.1mm ID) on the wire and plugged it in.
That was enough for the printer to go through its startup sequence. Now assured the printer at least powers up, I will order a 24V power supply that can supply more than 2.5A. (*) What else would I need to run this printer? The Form 1 and Form 1+ have fallen out of official FormLabs support since March 2017, so now the best reference material I have is the “Retro Form 1 Guide” compiled by a user and posted to FormLabs user forums.
Another consequence of being out-of-support is that FormLabs no longer sells replacement resin vats for the 1 and 1+. These are considered consumables due to something called “PDMS layer” at the bottom of the vat. PDMS in this context may or may not mean polydimethylsiloxane, but I understand it is something that gradually degrades during printing so it (and the resin vat it is attached to) needs to be replaced periodically. With FormLabs no longer supplying this consumable, I looked for aftermarket solutions and found Z-Vat Industries. They would sell me a replacement resin vat.
FormLabs also no longer sells their specifically formulated resin in bottles we manually pour into a Form 1 resin vat, only in cartridges for installation into Form 2 and 3 which dispenses resin automatically as needed. From this FormLabs forum thread, I learned that resins for DLP resin printers are very different formulation from resins designed for laser resin printers like this Form 1+. (Quick summary: laser resin is designed to be sensitive to a quick flash of intense laser beam, DLP resin is tuned for longer exposure to less-intense light.) This fact drastically limited my options of aftermarket resins, leaving a few vendors like ApplyLabWork. Looking over their catalog, I will avoid the brittle precision resins and order one of their resilient “Robust” resin.
Resin printing is expensive, and FormLabs resin printing more so! I’ve spent nearly $300.00 just so I can find out if the printer even works. And the answer was… it doesn’t.
(*) Disclosure: As an Amazon Associate I earn from qualifying purchases.
I love the concept of serial bus servos, writing them up for the Hackaday audience and designing my Sawppy rover around the low-cost LewanSoul LX-16A serial bus servo. After a few years of actual use, it’s fair to say the honeymoon period is over. LX-16A availability were unreliable even before the global supply chain crunch, and now it’s even worse. Furthermore, the hardware has some really bad failure modes. Two people have experienced failure where battery voltage (~7.4V) get sent out to the USB 5V bus, killing whatever Raspberry Pi was connected via USB. I have firsthand experience where a failed LX-16A shorted battery power to ground, blowing the fuse and required field repair in the middle of Maker Faire. Due to these problems, I intend to move away from LX-16A for future projects.
Now I’m going to open up “FAILED SHORT” servo to look inside. Maybe there’s something visible relating to its failure.
On the upside, the mechanical bits look great. The gearbox used well-lubricated metal gears throughout, and there’s a decent looking ball bearing supporting the output shaft.
Nothing has obviously failed on this side of the control circuit board. The square chip appears to be the main processor. There are four lines of markings on this chip:
HL004
642GB
2634B071
ARM
A web search found this forum thread that identified the chip as a Nuvoton MINI54ZDE, a little Cortex-M0 processor at 24MHz. If I get into playing with ARM microcontroller programming, I might be tempted to connect to the row of five pins and see if I can get a debug connection to that chip. Obviously, if I were to do this, I would use a different LX-16A that doesn’t short power to ground.
The next two largest chips appear to be identical, both labeled with:
4606
GA7N3C
A search found these to be AO4606 MOSFET by Alpha & Omega Semiconductor.
I see no obvious signs of failure on the other side of the circuit board, either. I see an ALPS potentiometer for position sensing, and a 1117-3.3 LDO voltage regulator.
On the upside, the lack of visible failure meant the fuse did its job well, blowing before anything really bad happened to this board. The downside is I have no visual indication of what went wrong. I’m mildly tempted to power up this servo without a fuse just to see what component blows up.
I have another failed LX-16A, this one “merely” stopped moving. It was still communicating with the rest of Sawppy controller system, with all diagnostics information showing OK. Except it doesn’t move. Powering the DC motor directly got me some motion, so at least the mechanical side is fine.
Given the lack of motor movement, I thought perhaps one or both of the MOSFETs have fried. But they look fine on this unit. Nothing’s obviously gone wrong with the CPU, either.
These two teardowns failed to provide any illuminating insight. I saw nothing at all that would explain faulty behavior of these units. Looking on the bright side, I’m glad neither of these devices went up in smoke and their mechanicals are still sound. I could still control the mechanicals by replacing these failed control boards with a DC motor H-Bridge controller like the classic L298N or the newer DRV8833. Turning them into a pair of gearmotors with metal gears and a ball bearing on the output shaft.
It’s summertime in Southern California, which means a surge of mosquito trying to harvest human blood. I do not appreciate being an excellent source of protein, and the weapon I find most satisfying for fighting back are electronic mosquito zapping paddles. Some call them electronic flyswatters but I think that’s a misnomer. At least around here, where our usual species of flies grow far too big to be caught in the mesh.
This one says “Electronic Mosquito Trap” right on the handle. There is an activity light visible through a clear plastic window, and barely readable on that clear plastic is “Little Angel”, possibly a brand. Powered by a pair of AA batteries, the voltage is drastically increased to build up a high potential difference between layers of metal meshes. When a mosquito tries to fly through those layers, they short the circuit ending their bloodsucking quest.
A household commodity made at great volume for low cost, they are practically disposable. This particular zapper was damaged when one of my vigorous swings crashed into the wall. The shattered rim of brittle plastic is cosmetic, but the mesh has also been bent so that the layers touch. It is no longer possible to build a high voltage potential between mesh layers, so it is time for a teardown before disposal.
I expected a voltage boost converter circuit within, implemented in the simplest and lowest cost method possible. I only recently learned to recognize a boost converter when I see one, and this guy certainly qualifies. Implemented with large through-hole components, it looks we have the basics of: a transistor, a coil, a capacitor, and a diode.
Boosted voltage are sent to metal layers via these wires, whose insulation was damaged during assembly at the factory. At least the plastic is still an insulator.
Indicator light wires were also damaged in assembly.
The yellow output wire was connected to the center layer of the mesh sandwich, the two red output wires (both soldered to the same point on the circuit board) are connected to the top and bottom meshes.
Learning more about boost converters is on my to-do list. After I have a better idea of what’s going on, I want to look at this circuit again. Perhaps I can make my own improvements on a mosquito zapper paddle!
My first SSD was a Patriot WARP V.2 32GB SSD. It not quite the bleeding edge, that “V.2” signified a revision that solved some issues in the first wave. Early experience with my first SSD was amazing enough for me to look for a larger 120GB unit to gain a little more elbow room in day-to-day use. They both represented early technology with flaws that needed solving before SSD became long-term reliable. I didn’t know that when I bought them, but it was certainly made clear as their performance degraded over a few years and then dying entirely when they no longer showed up as SATA drives when plugged them in. I took apart the first Patriot drive, now it’s time for the second OCZ drive.
Since they were both built around the JMF602 controller and arrived on market around the same time, I expected them to both utilize a JMF602 reference design. Before I opened up this SSD, I expected the circuit board to look identical to the smaller Patriot, just with higher capacity flash memory chips.
I found I was wrong when I opened up the case, this drive used a very different circuit board layout. This design placed the JMF602 at the center, and I don’t see an obvious debug header. There is still a connector adjacent to the SATA data port and it is populated on this drive: a USB mini-B socket that lets this SSD act as a USB flash drive.
Four more flash chips live on the other side of this board, again in a different layout compared to the Patriot drive. They seem to have the same production information sticker, but that might be some sort of industry standard sticker.
Thanks to the USB port, I could still access this drive even though the SATA port no longer enumerates. It is only an USB 2.0 connection, but I don’t think that is a constraint. Write performance has degraded to an atrocious level on this drive. Here I’m copying a single large ISO file to the drive. 25MB/sec throughput and a response time of nearly 500ms are well below limits of USB2.
Read throughput is only slightly better at nearly 40MB/sec and a 20ms read response time is significantly faster but still not great. Since this drive still works via USB, for now I’ll spare it the hot air treatment I performed to the Patriot. But given this level of performance I’m not sure if I can do anything useful with it.
When the cost of flash memory dropped low enough for consumer-level solid state drives to come to market, it was a time when multicore multi-gigahertz processors sit mostly idle waiting for data to be fetched from a spinning platter hard drive. SSDs resolved that performance bottleneck and provided a huge boost to overall system performance. But like all revolutionary technology, early implementations had some serious teething issues. Some problems required operating system support like TRIM to solve, which didn’t show up until later.
In those pre-TRIM days, the most affordable consumer-level SSD were built around a JMF602 controller. It helped make SSD affordable, but without TRIM and related functions, those drives weren’t durable. My first two SSDs used JMF602 and both drives died within two years of use. When I plug them into a computer’s SATA port, they no longer enumerate as devices as if they weren’t plugged in at all.
I forgot I had kept those two drives until I found them in my pile of old computer hardware. I might as well open them up before I dispose of them. I don’t expect to see much: just a circuit board inside a 2.5″ form factor metal case. But I was curious if those two circuit boards would be identical: it is fairly common for multiple manufacturers to use the same reference implementation and sell basically identical devices.
First up is Patriot’s WARP V.2 with a paltry 32GB capacity, model PE32GS25SSD.
I found the expected single circuit board inside. The infamous JMF602 chip amongst multiple Samsung flash chips. I see a row of four vias on the lower right edge resembling an unpopulated debug header. (Not that I’d know how to debug this thing.) In the lower left, adjacent to the SATA data connector, is an unpopulated connector blocked off by the metal case. We’ll see this again later.
Four more Samsung flash chips reside on the other side of the circuit board.
I now remember why I kept the drive even after it failed: I had personal data on this drive when stopped responding. Even though it doesn’t enumerate as a SATA device for me, I was worried that the data could still be recovered. Perhaps through that debug header, or possibly a SATA diagnostic tool could unlock it.
Making data really difficult to recover is easy with a spinning platter hard drive: I would open it up to expose those shiny platters. Everyday household dust would render those data surfaces unreadable except to maybe the NSA. But at the time I didn’t know how to perform similar data destruction with SSDs. I had contemplated drilling a hole through each flash chip, but now that I have a hot air rework station, I decided to remove all 16 flash chips from the board. If someone wants to steal my data, they’ll have to decipher how my data was spread across these chips and do a lot of soldering. I may still drill a hole through one of those chips just for curiosity, but first I want to compare and contrast this drive with my second SSD based on the same JMF602 controller.
Cutting apart a well-sealed Makita battery cartridge was a big milestone for my Cutra Wondercutter S purchase. It was the first big project that would have been unreasonably difficult to do with any of the other tools I have on hand. With this milestone, I am confident the tool has a unique niche. Does it justify the cost? That’s a harder question whose answer will depend on usage and budget.
I bought my Wondercutter from Micro-Mark after doing a bit of window-shopping research on the item. I was simultaneously optimistic and skeptical that its capability will live up to its high price tag. When I opened up the box, I saw that a small piece of test material was included in the package for us to take our first Wondercutter cut. It is some sort of foamcore material, and it presented the best-case scenario. It was thick and durable enough to take effort cuting with my X-Acto #11 blade and even then, the cut wasn’t very clean. But Wondercutter sliced through like hot knife through butter on this material and also leaving a clean edge.
I then tried it on materials that I expect to work with. A scrap sheet of 3mm acrylic took more effort to cut than the test material, but it did cut just the same. The sight of acrylic melted along the cutting edge was accompanied by the smell of heated acrylic. Some of the cutting action must have been from heat melting the acrylic and not just the ultrasonic cutting action. This sample indicated the Wondercutter is no substitute for a laser cutter for clean sharp edges. But I don’t have a laser cutter, so a Wondercutter will work in a pinch for quick acrylic cuts at home.
The next tests were done on various failed prints from my 3D printer. Printed PLA cut more easily than acrylic, with similar sight and smell of melting. PETG was more difficult to cut and, thanks to its higher temperature resistance, there was only minimal melting. Another characteristic of cutting PETG is that I could occasionally feel vibration through my fingers, like a dental cleaning session which can be unpleasant. Printed support materials were easier to cut than solid shapes, as they are intentionally printed to be weaker. For this purpose, using a Wondercutter is faster than my X-Acto blade, but by itself is not necessarily enough to justify the expense. I’ve read that the Wondercutter is great for cutting resin support structures, so I look forward to that if I ever get into resin-based 3D printing.
The final test was done on a circuit board. Some Wondercutter vendors claimed it can cut circuit boards, though neither Cutra nor Micro-Mark mentioned it either way. This was a no-go. While the blade could make its way through FR4 fiberglass, cutting progress came to a literal screeching halt as soon as the blade touched a copper trace. It damaged the blade, so I had to replace it. Thankfully there is a pack of 40 replacement blades in the box. I hope it didn’t damage the transducer.
With this bit of testing under my belt, I start pulling out the Wondercutter for various teardown projects. The first big win was cutting the ultrasonic transducer mount free from an oil diffuser. It went much faster than an X-Acto blade and less messy than a Dremel cutting wheel. Some smaller jobs were sprinkled here and there, like cutting the battery tray free from various devices so I could use them in my own projects. Or the plastic-encased bearing assembly of an evaporator fan. The Makita battery project is similar to the oil diffuser transducer: much faster than an X-Acto blade, and less dangerous than a Dremel cutting wheel. The Wondercutter is an expensive investment an order of magnitude more expensive than a Dremel and two orders more than an X-Acto blade. But every once in a while, I find myself in need of its capabilities and glad that I now have it.
I took apart an old Makita cordless drill (M651D) to take a look inside. It was very well designed and friendly to servicing, meaning it was easy to take it apart and put it back together still in working condition. The drill is still good, it’s too bad its NiCad battery packs are worn. Which made me think: what if I can hook up another battery to this drill? Since I wanted to leave the drill itself intact, I will remove NiCad cells from the battery pack and solder new wire in its place.
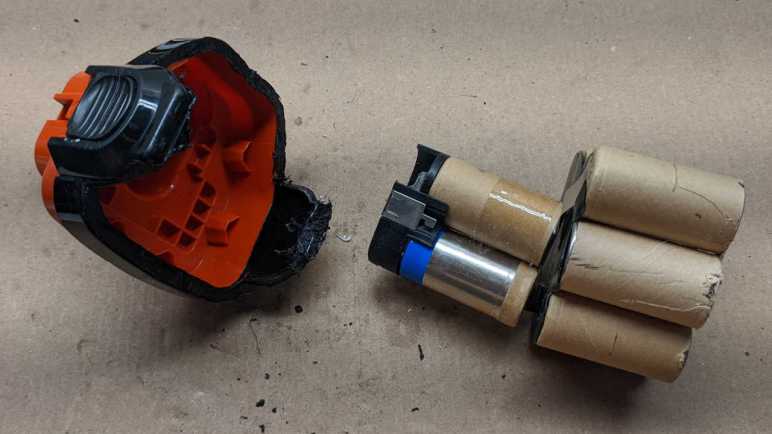
This is easier said than done. While Makita’s DC1414 charger and M651D drill were designed for easy disassembly and servicing, the Makita 1250 battery pack is sealed up tight. There were several YouTube videos of people taking these battery packs apart, and I can see it is glued together all around the perimeter between black and orange plastic pieces. The only way inside is to chisel apart durable ABS plastic.
Fortunately, it appears the battery cells themselves were not glued in place. So I’m going to try a different route and cut from the bottom with my Cutra Wondercutter S. This is not the safest of activities but I’m willing to cut near battery cells because of the following:
They have no remaining charge to arc or cause problems.
These NiCad cells have a sturdy steel can exterior.
Even if I manage to puncture a can, NiCad chemistry is less volatile than lithium-based chemistries.
I started with a small cut to find the depth of cut. This also gives me location of a single NiCad cell and lets me get a rough guess of where the rest of them are.
I gradually cut more and more of the bottom away. The Wondercutter does a pretty good job with ABS, cutting partially with its ultrasonic action and partially with the heat generated by said action. There’s definitely the smell of melted ABS but much more pleasant than if all the cutting were done by melting ABS with a heat knife. It does scratch the surface of cells, but didn’t come close to puncturing them.
I had hoped the NiCad cells would just drop out the bottom, but they were actually held very tightly by the base. Around the perimeter are small triangular pieces of plastic that follow the curve of each cell and wedge the entire pack in place. I had to cut all around bottom perimeter in order to remove those wedges. The final two were just inside the plastic clips that I wanted to keep so it could still be installed on the drill.
Annoyingly, those two final wedges were still strong enough to hold all batteries in place! I had to carefully cut away one wedge before I could dislodge the entire pack of cells.
These cells will go to a proper channel for NiCad battery recycle. But before that happens, I want their power contacts.
Those contacts were attached with a battery spot-welder and could be freed with some… mechanical persuasion.
Earlier I took apart a car battery charger, so I had a pair of wires handy and already designed for high amperage around 12V. I soldered them to salvaged battery contacts and reinstalled them inside battery enclosure. Reinstalled back onto the drill, it becomes a corded drill powered by wires. I don’t know what alternate power source I want to connect to these wires yet, but this hack of a Makita 1250 battery enclosure lets me supply power to an unmodified M651D drill.
A large part of the cost of a cordless drill system are in its batteries, so when this Makita cordless drill wore out its NiCad batteries, it made more sense to get a modern lithium-ion powered drill system to replace this one. Retiring it to the teardown workbench. I tackled the charger first, because I didn’t think there was much point holding on to a NiCad/NiMH battery charger when lithium chemistries have taken over. Next up is the drill itself, which is an interesting comparison to an even older cordless drill taken apart at SGVHAK a few years ago.
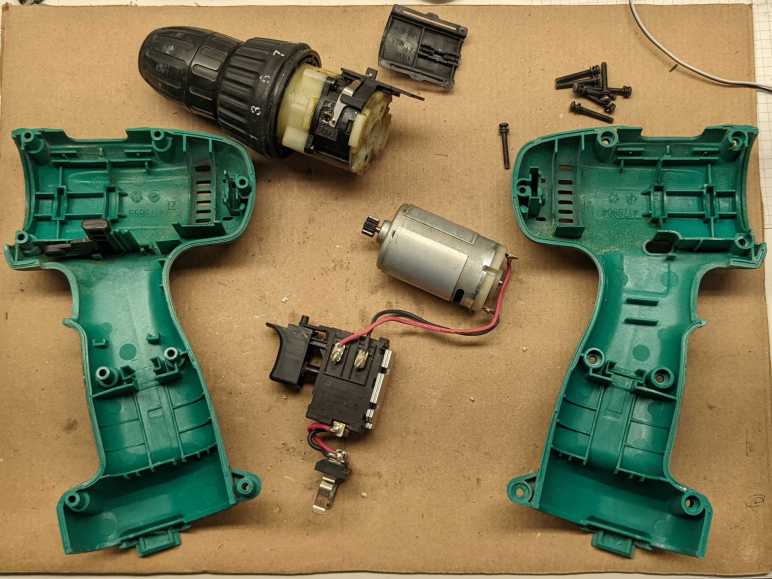
The drill itself still works fine. As a powerful motor and gearbox combination with a torque-limiting clutch, I think it’ll still be useful for something, so this is only a partial and nondestructive teardown in order to leave it in working condition. Thanks to excellent work by Makita designers and engineers, this turned out to be extremely easy.
One element of this ease is how this drill was held together by machine screws. Not self-tapping plastic screws, which are cheaper and easier to assemble but weaken every time they are removed and reinstalled. And those machine screws go into captive hex nuts, not heat-set inserts. Together, it means this drill can be disassembled and reassembled repeatedly without weakening. Nice!
After I removed all of the fasteners, I pried the two blue plastic halves apart. As I did so, all internal components fell out. It was startling at the time, but then I was happy to realize that it meant all internals are easily accessible and nondestructively so. Major subsystems fit together without any adhesives or additional fasteners.
I see the planetary gearbox has provision for fasteners to hold it onto the motor, but that provision was not used. It was not necessary: the drill enclosure held them against each other well enough for the drill to function. Speaking of that planetary gearbox, I see a few screws for further disassembly and decided against it. I wanted to keep the gearbox in running order, and I didn’t want the mess of lubricants all over my workbench. Someday I might take it apart to see internal implementation of high/low gear shift and the torque-limiting clutch, but not today.
Control of motor speed and direction is handled by a completely integrated unit. It has solder points for battery terminals on one end, and motor terminals on the other. It exposes two mechanical controls: one for direction, and the trigger for speed. Printed on the side is:
defond
DGT-1225A
25A 14.4VDC
I found the website for Defond and its “Power Tools” division that specializes in making such devices for other companies. I found no listing for DGT-1225A or a catalog at all, implying each product is a custom unit designed and built for a customer like Makita. More useful to me are the ratings printed on the side: up to 25 amps and 14.4V DC. This gives me the power envelope I must keep in mind if I want to incorporate this motor and gearbox into future projects. If I want to put them under a microcontroller’s programmatic control, I’ll need to use motor drivers capable of handling 14.4V * 25A = 360 Watts. Or perhaps I can rig up a different set of batteries?
Cordless drills are very convenient to use, removing the worry of power cord management. But the batteries that give them their independence from an extension cord is also their weak point, degrading faster than their mechanical parts. This Makita M651D cordless drill system dutifully served many years, but its nickel-cadmium (NiCad) batteries could no longer hold enough charge to last a work session. Replacement cartridges are available, but it was more cost effective to upgrade to more powerful and longer-lasting cordless drills with lithium-ion battery packs. Which was why this system was retired.
The least useful part of this system is the DC1414 charger, as it was precisely tuned to charge those out-of-fashion NiCad chemistry batteries. I’ll take it apart first.
The charger disassembled easily, no glues or anything annoying held it together. Which is a good thing, because in the lower right corner of the circuit board I see a fuse that requires disassembly to replace. I also see a dotted line across the middle of the board, likely marking separation between high and low voltage areas of this board. I see the logo for Tamura corporation, who Makita apparently subcontracted for this device.
The circuit board is a single-sided design, with through-hole components on the top side without copper traces. On the bottom we see a few surface-mount chips and copper traces, some quite wide for more power-carrying capacity. There is a notable gap across the middle, corresponding to high/low voltage divider line drawn on the other side.
Unusual shapes at several solder joints for high-voltage components caught my eye. In addition to the typical cone shape structure, these solder joints have a five-fingered extension from the base of their cone. Is this intentional or accidental? If intentional, what is their purpose? If accidental, what caused it to happen? I don’t know enough to make educated guesses. The plastic enclosure for this charger will go to landfill, and the circuit board will go to electronic recycle. I shift my attention to the M651D cordless drill itself.
I was given this Hardie Irrigation sprinkler controller to take apart, which I’m happy to do.
Color scheme and general design makes it look several decades old. I found nothing that could give it a definitive age, and I’ve found no information about this product online. Its lack of online presence supports the “several decades old” hypothesis.
Flipping up the lower access door we see terminals for sprinklers and a power transformer, a fuse, and two screws. Removing those screws allowed me to remove the core of the device.
Backside of the plastic control panel exposes the plastic ridges that give tactile detents to the selection knob. We also see the front of the circuit board, which has all through-hole components and no traces visible in the front.
All traces are on the back, where we also see the selection dial is not a rotary encoder. It makes actual electrical contact to individual functions.
Returning to the front, I see this is the largest chip on the circuit board. I have no idea what it is, my online search came up empty. [UPDATE: Randy identified the COP444L as a member of the COP400 family of 4-bit microcontrollers. See full comment below for a link to the datasheet. Thanks, Randy!]
The six sprinkler stations are each controlled by one of these. Online search found these to be triacs. I thought it was interesting how we have two of one type and four of the other.
The only item that interested me was the digital illuminated display. These look like old school LEDs. I understand that before manufacturing large LEDs became practical, the only cost-effective option are these tiny little guys. To make them more readable, they are accompanied by plastic bubble magnifying lenses. There appear to be provision for eight digits, but only four are populated.
I see tantalizing hint of more than seven segments in each digit. It looks like there are two center vertical segments so we can go a good “T” and other things difficult with just seven segments. Also, all of the horizontal segments appear to be split to the left and right of center vertical. This can potentially be a 12-segment digit.
However, when I applied my LED tester to various combinations of input pins, I could only illuminate each digit as a seven-segment (plus decimal point) display. I’ll salvage this bubble LED in the hopes I can decipher its secrets later. For now, I see no reason to hang on to the rest of this bulky box and will dispose of them.
My normal home dental routine includes daily Waterpik cleaning, which has been great for my teeth but there’s a cost. Water and electrical mechanics do not peacefully coexist (just ask anyone who owns a boat) which might be why my Waterpik machines haven’t lasted very long. A few years ago I took apart a battery-powered Waterpik that had died, today I am taking apart another.
This one is powered by household AC and it hasn’t quite died. However, it is noticeably less powerful than it used to be. When it was too weak to dislodge a piece of food wedged between my teeth at maximum strength setting, I replaced it with a new unit to restore full teeth-cleaning power. I want to see if I can find any sign of wear and tear that would explain the reduced strength.
An electrical appliance that has water running through it is definitely presents a risk for electrical shock! I’m going to disregard the warning on this bottom label and open it anyway, as I don’t intend to put it back together or run water through it again.
Adjacent to the label is a socket for the handheld wand. Removing the plug unveiled a rubber O-ring seal, which was expected, and this tan-colored flap of plastic, which was unexpected. I see a mesh texture that made me think it might be some sort of filter, but it is not a mesh and seems fully watertight. My best guess is some sort of backflow prevention.
I didn’t expect to find much inside the handheld wand, but I cut it open anyway to confirm. The on/off water flow valve seems fine and there’s no sign of obstruction.
Returning to the base, I removed four Philips-head fasteners between base and enclosure. The strength adjustment knob also had to be pulled out before the enclosure can move.
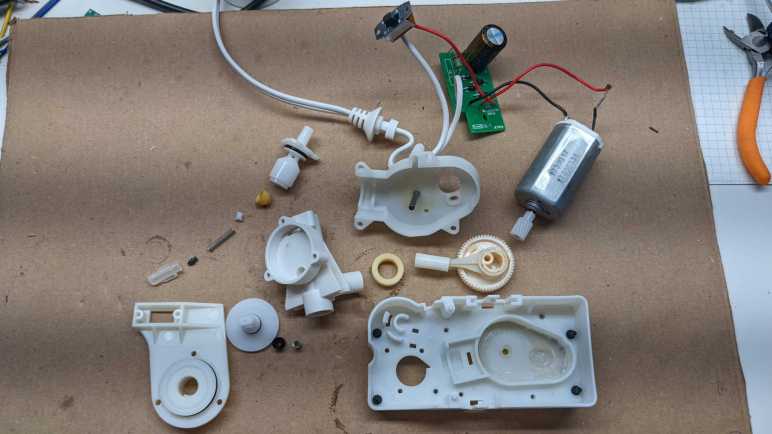
Inside the enclosure we see a black cylinder where water is fed from a reservoir, and we can see a bit of orange colored sealant to make the joint watertight. The gear-looking thing is for the power switch. It looked and felt like a rocker switch, but it actually has this rack-and-pinion mechanism to translate the rocking motion to a linear sliding switch. If the designers wanted a rocker switch, why didn’t they use an actual rocker switch for household AC? This mechanism feels like unnecessary complexity.
We also see signs of a fine black dust/powder inside, more details on that shortly.
After the sliding switch, AC power is fed through an array of diodes for rectification. A big capacitor smooths output and a resistor drains residual charge from the capacitor after use. [UPDATE: A comment pointed out my mistake, the resistor is not in parallel with the capacitor. It is in series with line input, which is consistent with a resistor for controlling inrush current.] The strength knob has no involvement in the electrical side at all, the motor always runs at full speed and jet strength is a strictly mechanical affair.
I had expected the power to go straight into an AC motor, but that rectifier circuit was necessary as this is actually a 120V DC motor. Something about this DC motor was worth adding the cost of rectification circuit board, I’m curious what tradeoffs are involved.
A disadvantage of DC motors is the need for commutator and brushes, which wears over time. That black dust deposited all around enclosure interior are little bits of vaporized motor brush and commutator flowing out of the motor like smoke, as we can see here. Worn commutator/brushes is the first visible candidate explanation for reduced strength of this device.
Here is the jet strength adjustment mechanism. The spring-loaded gasket at the bottom pushes against the adjustment disc, which has a thin groove through it. It looks like turning the dial adjusts how much of the thin groove is presented to water flow, sapping its strength on longer journeys.
But that is only a guess, because I’m not confident I understand how this system works. Here is the water reservoir intake assembly, which presents two paths for water coming in from the reservoir. One through the holes at the side of a narrow neck, and the other through a spring-loaded contraption for purposes I don’t understand. Once this assembly was removed, I could see the intake tube actually goes all the way through to the exit for the handheld wand.
For the Waterpik to function, all of this must implement a system to ensure one-way flow of water, but I have trouble visualizing how the hydrodynamic forces would interact to make that happen. Disassembling the spring-loaded contraption got me no closer to illumination. Somewhere in here might be the answer to reduced strength as this device aged, but I couldn’t begin to guess how.
The water-pumping piston assembly was relatively straightforward. Motor shaft output is geared down to a crank to move the piston back and forth through its cylinder. No signs of water intrusion and all the lubricants still in place explains why there are no signs of wear or play in the mechanism. Whatever caused this Waterpik to weaken over time, it’s probably not here.
The best hypothesis so far is wear and tear on DC motor brush and commutator. I want to open it up for a look, but the motor is held by these metal tabs bent from the motor can. Roughly one millimeter of steel is too stout for me to bend out of the way with pliers.
Which means it’s time for the Dremel cutting disc!
Once those two tabs were cut out of the way, I could remove the white plastic end cap and see the motor commutator and brushes. They are very definitely worn, but I wouldn’t have expected this level of wear to cause a severe degradation in output power.
This Waterpik base managed to keep a few a secrets even when disassembled. I still don’t understand the complexity of how water flow is restricted to be one-way, and I failed to find an obvious explanation for a weak output jet. At the rate I’m wearing them out, though, I’m sure I’ll have another opportunity in a few years.
I love Microsoft’s Arc Touch Mouse. It seems like one of those fancy design concepts that never make it beyond a rendering, but it is actually a real product we can buy. A Bluetooth computer mouse that is also a transformer that flattens for easy portability? I thought it was so cool, I bought one of the early versions: Surface Edition model 1592. Looking at the latest edition, I see they now have fully capacitive touch surfaces. Mine had two physical buttons for left and right click, and a touch surface in the middle to emulate a mouse scroll wheel and center button.
I would not have been surprised if the collapsible mechanism failed after years of use, but it has actually proven very durable. My problem is the forward section plastic which has degraded and oozing a sticky liquid I could not clean. It captures dust and dirt, and leaves my finger sticky after I touch it. It feels unpleasant so I don’t use it as a mouse anymore, making it an ideal teardown project.
Note: There will be some inconsistencies in these pictures. Partway through this teardown, I finally saw enough of the internals to realize I did not take it apart in the optimal order. I’m presenting these pictures in the order I should have used to take it apart.
Arc Touch Mouse has a smooth and unornamented exterior. All the legal requirements and identifiers are on a label inside the battery compartment.
Peel off that label to unveil a set of debug/test points and two T5 screws.
Removing them releases the top button surface, though it is still attached by two cables.
Disconnecting a ribbon cable and a two-pin haptic feedback connector will allow the top to be removed. I set this aside for a closer look later.
Once the top is removed, we can safely remove four screws holding a bracket for the rubber skin in place. Once freed, the flexible portion should be something we can peel off like a sock. Of course, I had already cut it apart with a knife by the time I realized this, so I’m not sure. Only the bracket itself is left visible in this picture as I had already cut the rest of the rubber sock away.
With the rubber sock removed, we can see the transformer mechanism. Holy parts count, batman! There are ten plastic segments to this mechanism, held by flexible spring steel top and bottom fastened by screws and plastic rivets. I did not expect this much complexity.
All of those parts were necessary so the mechanism can take one of two positions.
Top sheet of steel is fastened by melted bits of plastic forming rivets. The bottom is a four-sheet assembly so they could slide past each other as the mechanism curves. Under those four sheets is a long strip of copper-colored metal which is the key to how this mouse can hold one of two distinct positions. A strong magnet lives in a cavity at the end of the curvature, with two bits of steel at either end. The magnet wants to be up against one of those two pieces of steel, which corresponds to the flat and curved positions of the mouse. This is very clever! It also reminds me of another magnetic mechanism a convertible tablet used to stick to its keyboard dock.
The curved/flat transforming mechanism is also the power switch for the mouse, implemented as a tiny little thing adjacent to the magnet cavity actuated by a right-angle fold in the copper strip. I am amused that they had to make a circuit board just for the sake of hosting this surface-mounted switch.
Returning to the top plate, most of the complexity here is centered on the capacitive touch strip in the middle. At the lower right, we have a side-lit LED activity indicator. Behind the circuit board is a long rectangular haptic feedback device. Printed on this flexible circuit is the following:
I infer “Dali” was the development codename for this device.
I tried to extract the capacitive touch flex circuit intact, but I unintentionally ripped it in half.
Before this teardown I had assumed the haptic feedback came from a motor with an eccentric weight on its shaft, common for cell phone vibrations and such. This device was too long to be a spinning motor, so I wanted to see inside. It was wrapped in no less than four layers of sheet metal. So thin, they were barely more rigid than paper and practically razor blades. I had to be very careful peeling them apart to find a small coil-wrapped armature between two magnets.
The mainboard of the mouse is almost boring in comparison to the rest of this device, but it does confirm the Dali name with:
Dali
Navigation_V2R0
I was surprised to see that the mouse position optical sensor is separate from its illuminating LED instead of together in an integrated enclosure. I briefly thought about removing the sensor for novelty’s sake, but these things are tiny. I decided not to spend time getting something I’ll lose the next time I sneezed.
This was an epic teardown. The Microsoft Arc Mouse is a premium product, significantly more expensive than lowest-bidder Bluetooth mice on Amazon. But I love its novel design. After seeing all its components, I’m actually surprised it isn’t more expensive. In fact, I’m surprised it got approved for manufacture at all! I wonder if mechanical engineers have managed to simplify construction of current generation Arc Mouse, but they are too expensive for me to buy one just to take apart. Perhaps someday I’ll have a chance to pick up a broken unit and take it apart for comparison.
The main job of an iron is to make a flat piece of metal hot so we can use it to flatten wrinkles in our clothes. This particular iron was retired when it could no longer reliably do that one job. When plugged in, it would get hot as expected. Once it reached a certain temperature, it would slowly cool down, which is also expected. But it failed to turn the heat back on quickly. This iron would cool to almost room temperature before it would heat itself back up. I tried to find other use for it, but I’ve decided to take it apart. If I can fix it great, if not I will dispose of the remains.
No manufacturing date was visible on the product label. We see the old Black & Decker logo and searching for this model number IR0175W returned no results. Judging by appearance I would guess it is roughly twenty years old, because Apple made this “Bondi Blue” color cool in 1998 with the original iMac. Within a few years, everything made of plastic was available in this shade of translucent blue alongside white plastic.
The only externally visible fastener was a Torx 10 screw just below the power wire. It’s even a “security” Torx with a little post in the middle. It was quickly dispatched so this back plate can be removed revealing ordinary Philips head fasteners for the remainder of this teardown. “This would be easy!” I thought.
I was sadly mistaken. I couldn’t figure out how to remove the top plate elegantly and resorted to brute force. After it was torn off, I saw it was secured by a Philips fastener that was hidden under the steam pump button. (See green rectangles in above picture.) This button had plastic clips so that, once installed, it could not be removed. I see no way to open this without damage. This external enclosure is ruined, I’m not going to be able to fix it and put it back together.
The circuit board in the handle is interesting. It had 120AC line (red, labeled L AC2) and neutral (blue, labeled N AC1) coming in, and an output line (yellow, labeled OUT). The yellow and blue wires connect to the body of the iron, so this blue rectangular relay is definitely capable of switching the heat on or off. However, it is not in charge of temperature control, because there is no way for it to sense the current temperature or read the user adjustable temperature setting dial. This circuit board does have a mechanical sensor of some sort in the black rounded enclosure visible just to the right of the blue relay. It makes sounds when I shake it that is consistent with a little metal ball inside. I hypothesize this circuit implements the safety timer. If no motion is sensed over a time period, turn off the heat.
Removing the top deck and temperature dial revealed the Bondi Blue water reservoir. We can see the top end of the temperature regulation mechanism where it connected to the temperature dial.
Not much new is revealed once the water reservoir was removed. I was amused to notice that the reservoir was installed incorrectly at the factory. We can see the orange water gasket leading to the hot bits was crushed out of place for roughly one quarter of its perimeter. Thankfully I never noticed a leak from this error, though I didn’t use the steam function very much anyway.
The bottom-most layer in this stack: Heating elements permanently enclosed and bonded to the metal ironing surface. The temperature regulation system is fastened to the top of this layer.
Temperature regulation is a mechanical system centered around a bimetallic strip. Simple in theory: the circuit is closed to heat things until the strip changes its shape and opens the circuit. The system closely cools until the strip changes its shape again to close the circuit and repeat the process. Turning the heating level knob (top layer) I see it is a threaded contraption that ends in a white insulator point pushing on the second layer. Turning the dial subtly changes the bimetallic strip assembly geometry so it changes shape at different temperatures.
I turned the dial back and forth through its range of motion (~270 degrees) and I could see and hear the bimetallic strip pop back and forth. I did this a few times before I realized… wait, that’s not supposed to happen! This thing is at room temperature. A clothes iron shouldn’t be turning its heating element off at room temperature. This behavior is consistent with the observation this iron cools off too much before heating back up. I assert this bimetallic strip should remain at the closed position through the entire range of this dial at room temperature. But the only candidate for adjustment is a tiny flat head brass screw at the top of the dial, securely fastened by a blob of adhesive. I managed to damage the brass before I made any progress breaking that adhesive blob, ruining my chances of fixing it. This teardown was instructive but ultimately a failed repair. I disposed of the remains and moved on to the next teardown.
When I began taking apart a refrigerator fan motor, I expected to see simplest and least expensive construction possible. The reality was surprisingly sophisticated, including a hall effect sensor for feedback on fan speed. Seeing it reminded me of another item on my to-do list: I’ve long been curious about how computer cooling fans report their speed through that third wire. The electrical details haven’t been important to build PCs, all I needed to know was to plug it the right way into a motherboard header. But now I want to know more.
I have a fan I modified for a homemade evaporator cooler project, removing its original motherboard connector so I could power it with a 12V DC power plug. The disassembled connector makes it unlikely to be used in future PC builds and also makes its wires easily accessible for this investigation.
We see an “Antec” sticker on the front, but the actual manufacturer had its own sticker on the back. It is a DF1212025BC-3 motor from the DF1212BC “Top Motor” product line of Dynaeon Industrial Co. Ltd. Nominal operating power draw is 0.38A at 12V DC.
Even though 12V DC was specified, the motor spun up when I connected 5V to the red wire and grounded the black wire. (Drawing only 0.08 A according to my bench power supply.) Probing the blue tachometer wire with a voltmeter didn’t get anything useful. Oscilloscope had nothing interesting to say, either.
To see if it might be an open collector output, I added a 1kΩ pull-up resistor between the blue wire and +5V DC on the red wire.
Aha, there it is. A nice square wave with 50% duty cycle and a period of about 31 milliseconds. If this period corresponds to one revolution of the fan, that works out to 1000/31 ~= 32 revolutions per second or just under 2000 RPM. I had expected only a few hundred RPM, so this is roughly quadruple my expectations. If this signal was generated by a hall sensor, it would be consistent with multiple poles on the permanent magnet rotor.
Increasing the input voltage to 12V sped up the fan as expected, which decreased the period down to about 9ms. (The current consumption went up to 0.22 A, lower than the 0.38 A on the label.) The fan is definitely spinning at some speed far lower than 6667 RPM. I think dividing by four (1666 RPM) is in the right ballpark. I wish I had another way to measure RPM, but regardless of actual speed the key observation today is that the tachometer wire is an open-collector output that generates a 50% duty cycle square wave whose period is a function of the RPM. I don’t know what I will do with this knowledge yet, but at least I now know what happens on that third wire!
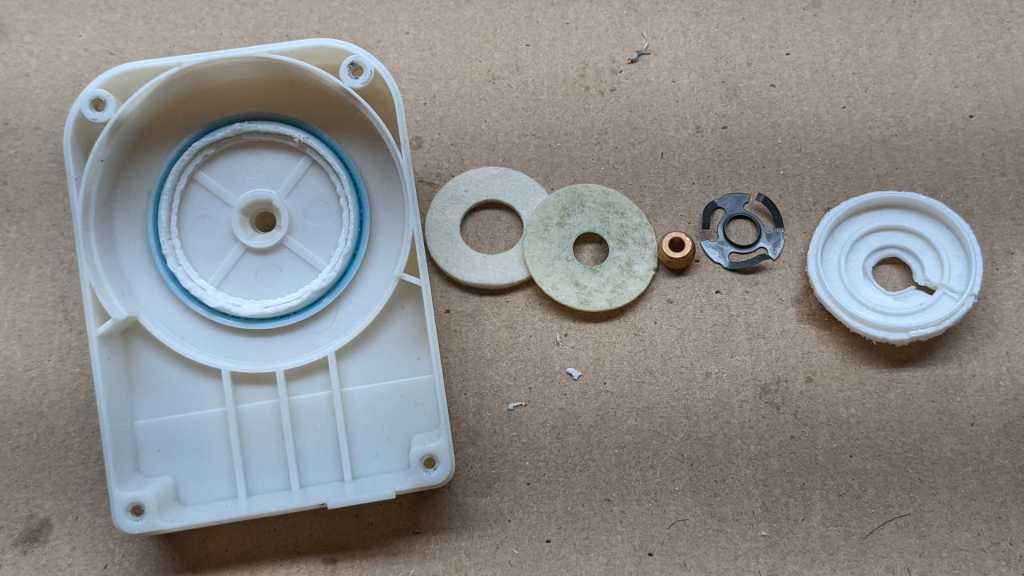
I took apart a microwave oven turntable motor and found it surprisingly simple. Encouraged, I dug through my “take apart later” pile for another appliance AC motor and found this item.
Searching for “ADL-5846AMEA” found this was an evaporator fan motor, meaning it was responsible for circulating cold air in a refrigerator. While we don’t care which direction a microwave turntable turns, the direction is very important for a fan motor. Given this fact, and assuming reliability and low cost would be the driving factors in the design, I had expected to find a shaded-pole motor inside this housing.
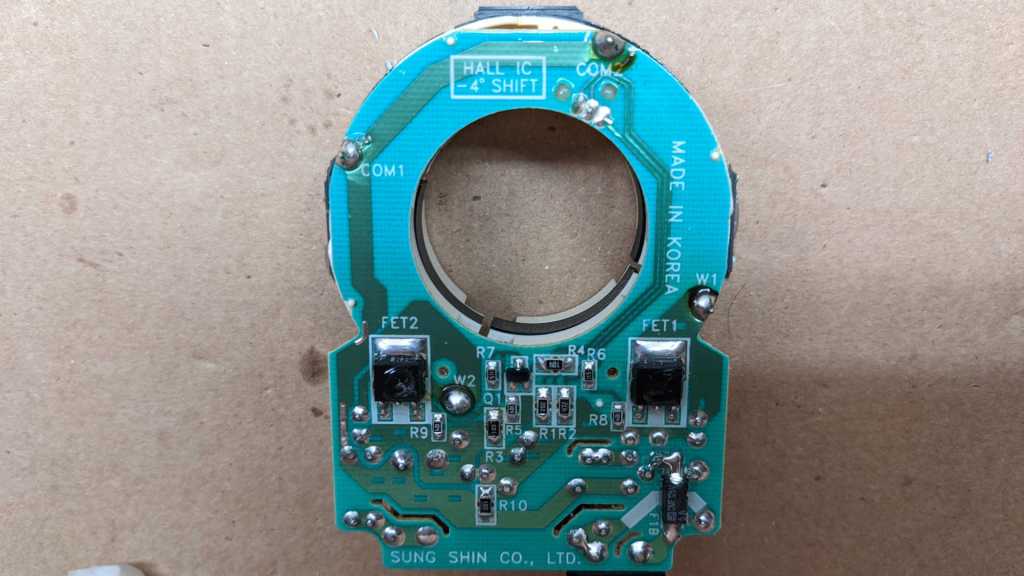
I was wrong! It was far more complex inside than I had expected. There are four distinct coils mounted to a circuit board with roughly a dozen other components. Through-hole capacitors and diodes are mounted on the same side as the coil.
The opposite side are mostly surface-mounted components, with two large prominent field-effect transistors (FET1 and 2). For me, the most unexpected component is the label box up top:
There it is, nestled between but slightly offset from the center point between those coils. Its presence means this control circuit has feedback on rotational speed of this motor. This can be something as simple as detecting a stall, or as complex as variable-speed control. This motor has only two wires for power input, leaving no provision for communicating speed control. Therefore if the hall sensor is for speed control, that control logic must be completely encapsulated inside this module. But following copper traces failed to find anything that resembled a digital microcontroller. I guess it is a completely analog control circuit, which is indistinguishable from voodoo magic for my current level of knowledge.
Why would a refrigerator need such complexity in a fan motor? There must have been a requirement that was deemed more important than “lowest cost” and my best guess is efficiency. Wikipedia claims shaded-pole motors are only about 26% efficient, and the rest would have turned into heat. Waste heat is especially bad for an evaporator fan motor that sits in the cold loop of the refrigerator. Making this motor more efficient reduces workload on the cooling system, helping the refrigerator meet Energy Star and other similar requirements around the world.
The two motor shaft bearings would have been another tradeoff between cost and efficiency. The motor shaft has a bearing assemblies front and back to reduce friction, which reduces heat and increases efficiency. It is more complex than a simple oil-embedded metal sleeve bearing and less complex than a roller bearing. My fingers could feel that the soft absorbent pads are oily, but I’m not sure what I’m looking at. Are they intended to serve as additional oil reservoir for the metal sleeve? Or are they supposed to draw oil out of it? This evaporator fan motor teardown was full of surprises, from the control circuit board to this bearing assembly. I love it.
Today’s teardown subject is a motor that once spun the turntable inside a microwave. Emily Velasco salvaged it from a broken microwave and reused it in a kinetic sculpture named Dark Star.
Sadly, Dark Star met an unfortunate end when it fell off the wall. Among the debris was this motor, its output shaft now severed. I asked for the damaged motor so I could see what’s inside.
Information was stamped into the front and back of this motor. I read the following information on the front:
Since “TYJ50-8A19” was stamped on both sides of the motor, I used that for my online search. Multiple Amazon vendors offered to sell very similar but not identical motors(*) and there were eBay and AliExpress vendors as well. (Some even have metal output shafts, which might have survived the fall.) Most of the listings described them as microwave oven turntable motors, some listings even had explicit model numbers of microwave ovens that used this style of motor. I guess “TYJ50-8A19” was the model number used by a specific manufacturer, but it has since been copied by others and became a generic designation. (For another example, see 28BYJ-48 unipolar stepper motor.*)
Front face of this motor was held in by the outer casing pressed inwards at four locations. Bending those tabs out of the way freed the face, showing this geartrain. The lubricant in this gearbox seem to get darker and more viscous (thicker) as we go from motor rotor towards output shaft. I can’t tell if this is because multiple different lubricants were used, or if this is the same lubricant responding to different stresses in use.
Flipping over the broken output shaft, I see broken plastic on the back side as well. Given how low the costs are for these motors, I doubt I could find replacement gears. The strength and precision required to replace this gear is beyond what my hobbyist FDM 3D printer is capable of, so I can’t make my own. If I had a resin printer I could emulate the shape, but I’m not sure if hobbyist level resins are strong enough. Another concern is the lubricant, which might damage certain resins.
There were six moving parts in this motor: the output gear/shaft, the rotor with a ring of permanent magnet mounted to a blue plastic hub, and four gears in between them.
A metal plate in the middle of the motor held four metal pins acting as axles for each intermediate gear. The axle for the rotor is a similar metal pin mounted to the outer shell. The output shaft which I had expected to receive the most stress does not have a metal axle shaft, a curious design decision that probably contributed to this motor’s demise.
Below that plate is… a single coil? This was unexpected. From the Wikipedia article for synchronous motor, I had expected to see multiple coils. Most of my teardown experience to date have been with DC motors, so I didn’t know quite what to expect with this AC motor. Given its price I knew it had to be simple to manufacture, but I hadn’t known they could be quite this simple in construction.
If it is indeed a single coil connected directly to the single phase of household 60Hz 120V AC, it would generate a magnetic field that flips polarity at 60Hz. In theory I understand that’s enough to get a rotor turning, but with a single phase there’d be no control over which way the rotor decides to start turning. This fits with the “CW/CCW” stamped on this motor, and ideal for the microwave turntable use case where we don’t really care which direction it spins.
But to make it work, what kind of magnetic field does this rotor’s permanent magnet need? In my mental model, aligning the magnet’s north/south poles to the rotor axis wouldn’t impart a rotational force as the electromagnetic field oscillates, neither would aligning the poles perpendicular to the axis. Now I’m curious and I want to visualize this particular magnet. I could buy a sheet of magnetic viewing film (*), or some ferrofluid(*), or some iron powder/filings (*). Or perhaps I could make my own metal filings? That will be a project for another day. Right now, I want to build on this experience and take apart another appliance motor.
(*) Disclosure: As an Amazon Associate I earn from qualifying purchases.
As an electronics hobbyist, I am quite familiar with the smell of fried electronics and burnt plastic. But I usually smell them immediately after I made a mistake, not waking up to that smell in the morning. I shot out of bed looking for the source, thinking one of my projects died overnight. But it wasn’t one of my projects. The smell was coming from my TrueNAS CORE server, which was surprisingly still running. After I properly shut it down and disassembled its power supply, this is what I saw:
Not good, something got hot enough to melt a hole.
The heat source appears to be this row of surface mount resistors. While a resistor is expected to turn electricity into heat, they’re not supposed to get this hot.
There are no components on the other side of the circuit board behind those transistors. Just a few identifiers “2960323904” and “DC-3266”.
The scorch marks left inside the power supply enclosure imply they got hot enough to start burning, which was thankfully contained within the enclosure and did not turn into a house fire. Hooray for electrical fire safety regulations! However, I’m concerned at the fact that it caught fire at all, as I would have the power supply to shut down when something goes wrong. Every one of my previous failed power supplies would shut down and refuse to run again, but this one kept running merrily along even after it had (briefly) caught on fire!
There were no signs of damage beyond this vertical riser circuit board. I saw nothing I recognized as a fuse, though I’m sure there are form factors I don’t recognize. [UPDATE: I took apart another computer power supply and found it died from a blown fuse. The fuse was very hidden and definitely not designed to be user accessible. Once I found the fuse in that other power supply, I was able to return to this power supply and find its non-user-serviceable fuse as well. This fuse did not blow despite the fire.]
No sign of overheated traces on the circuit board.
This power supply had been running quietly and reliably for years, powering my TrueNAS CORE server. My Kill-A-Watt meter indicated a steady-state power draw of roughly 80-90W, which is a tiny fraction of this power supply’s advertised 650W capacity.
I don’t remember how long I’ve had this power supply, but I am confident it is well out of warranty. The only date stamp I saw was on the back of the cooling fan, with a manufacturing date of December 13th, 2011. This puts an upper bound on the age.
Random side note: I think “Protechnic” is a perfectly reasonable name for an electronics supplier company. Given this episode of combustion, though, I also note it is just one unfortunate letter off from “pyrotechnic“.
I don't know what this row of resistors were supposed to do, but it is clear they could resist no more. pic.twitter.com/IPWlG3mAve