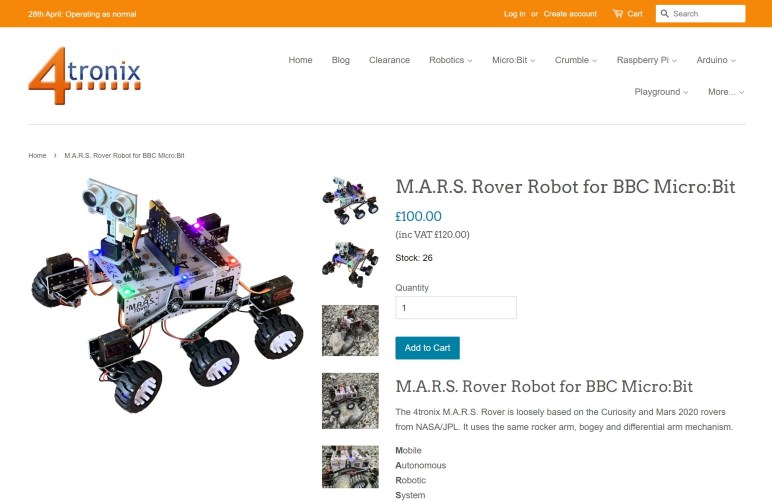
After seeing circuit boards being used as structural members in the 4tronix M.A.R.S. rover, I realized that I had forgotten a very fertile field: LEGO! My interest in mechanical systems today is something I give full credit to the LEGO sets I had growing up. My LEGO creations grew more complex as I grew older, limited only by my toy budget. However, once I got up and running on 3D printing objects of my imaginations, I haven’t touched my big box of LEGO since. I quite enjoy the freedom of not being constrained by what LEGO pieces are available.
Among currently available LEGO sets, there is a tiny little Mars rover as part of the LEGO CITY Mars Research Shuttle (60226). The set is quite affordable, but about the only thing its little rover has resembling Curiosity rover are the number of wheels. Beyond that, there is no rocker-bogie and no corner steering, which is not a surprise at this price point.
Moving up the price and complexity scale is the LEGO NASA Mars Science Laboratory Curiosity Rover (21104), released in 2014 and no longer in production. This was part of the LEGO Ideas program where people can submit their LEGO designs and, if enough other LEGO fans voted in favor, the LEGO group will consider adapting it for production. This particular idea received over 10,000 supporting votes and became an official product. Perusing its assembly instruction PDF, I was surprised to find that this rover has a fully articulating rocker-bogie suspension. Very impressive! I also sadly learned that it required several pieces that I lack in my own LEGO collection, so I couldn’t “just” follow the directions to build one of my own. At some point I could go hunt for the few missing pieces which should be cheaper than buying this out-of-production kit on eBay. People are asking over $100 for a used kit and as much as $1,100 for a never-opened box. That’s more than two Sawppy rovers!
But if price is no object, I can look to other LEGO creations people have posted. There are quite a few “LEGO rover” projects online, and it follows roughly the same trajectory as the past few window shopping posts: most don’t even have six wheels, some have six wheel rocker-bogie but no corner steering, etc.
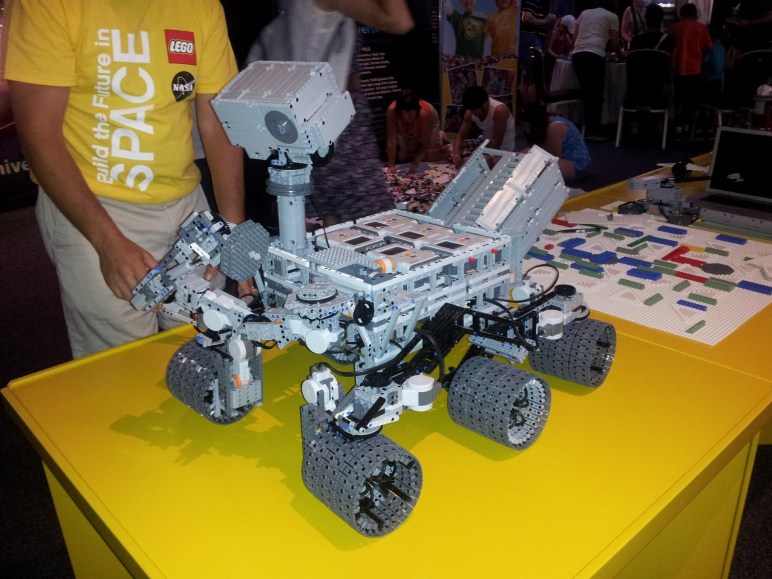
An example of a rover with corner steering is this LEGO MINDSTORM NXT creation. Despite being constrained by the selection of available LEGO pieces, it nevertheless replicated some features that I skipped with my 3D-printed rover. One example being the spokes in each of the six wheels, which I had simplified for 3D printing but the builder here faithfully represented more of the curves. And they have a robot arm, which my Sawppy is still waiting for. But according to the text, only the four corner wheels drive leaving the middle wheels free-wheeling. And it’s not obvious if the rocker-bogie articulates faithfully. At the very minimum, this design is missing the differential bar across the top.
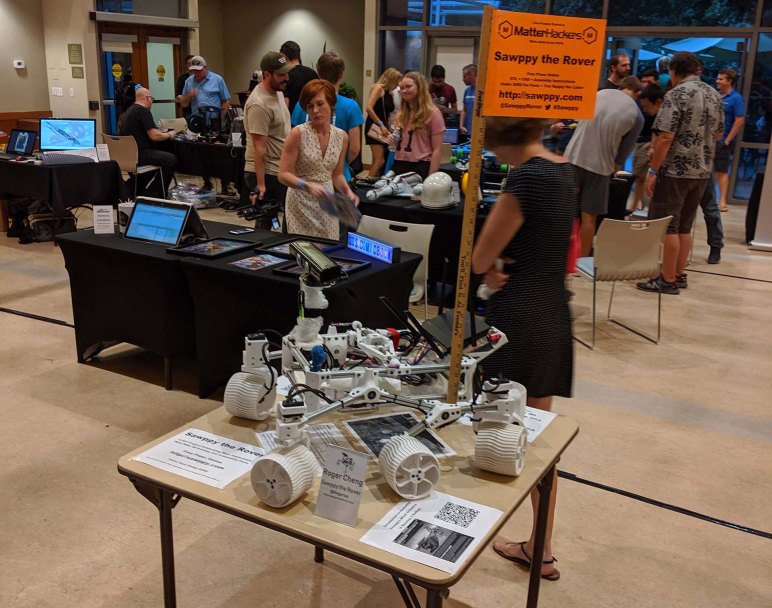
This rover looks to be roughly the same size as my Sawppy rover, but the price tag would be significantly higher. There are six visible NXT brains on this invention: five on board the rover and one for the handheld remote. Each $350 MINDSTORM NXT box comes with a single NXT brain, so this rover costs at a minimum 6 * $350 = $2,100 dollars. Yikes.
So as far as LEGO rovers go, the best ones that implement features I consider important are build-it-yourself designs by enthusiasts and not available as commercial products. Thus we return to the world of 3D printing, where Sawppy isn’t the only rover design floating around.