ROS is now over a decade old and quite established in its niche. Every day, there are newbies like myself who start their journey to learn the ropes. Motivated by ambition to build software stacks for their own robot projects. Personally, I’ve known about ROS for a long time, though only now am I putting in the effort to work with it firsthand.
When it comes to big software frameworks I definitely count myself as “Grumpy Old Man”. I’ve seen them before, I’ll get proficient at it, and then I’ll move on to the next thing. I don’t get excited… it’s just a tool. But some ROS newcomers get really excited about their discovery! It may not be news in the historical sense, but it’s certainly news to them and they might choose to submit to venues like Reddit or, in today’s example, YCombinator’s Hacker News. And apparently it’s only been about 10 months since the last time someone submitted ROS to Hacker News.

And since the internet is the internet, the comment thread is naturally filled with positive people espousing the benefits of ROS, thankful of an open source robot infrastructure available so no one has to reinvent the wheel.
Just kidding.
It’s the internet.
The comment thread is actually full of gripes from people critical of the cruft built up during the course of a 10+ year software project. Complaints about how the generalized infrastructure isn’t good enough for their specific needs. Complaints about how it doesn’t use [insert favorite pet technology thing here] without considering its history as of ten years ago. Was it mature? Dependable? Did it even exist back then?
Having worked on big software projects full of legacy code, I look at these “ROS people are idiots” complaints and I shake my head. I know that a software project as big as ROS would have made major decisions based on state of software not ten years ago (when ROS was released) but more like twelve or thirteen years ago when they started putting it together. Plus if they made early decisions based on proven track record, that track record would have stretched even further back.
Yeah, ROS is old. Which is why the Open Source Robotics Foundation, the organization supporting ROS, has focused most of its resources into ROS 2. A ground-up rewrite incorporating the lessons learned during all this time. I’m cautiously optimistic ROS2 will be all it’s promised to be, but we’ll just have to stay tuned to see how reality lines up.
In the meantime, ROS is here, it is mature, and while ROS 2 will be changing a lot of technical fundamentals, it will not change any of the underlying philosophies. So I’ll stay focused learning classic ROS. It has its values, no matter what internet comments say.
 While in the process of obtaining proof that a Raspberry Pi 3 is under-powered for certain ROS processing tasks like mapping, I took a little side trip into the world of Raspberry Pi thermal management. Anyone who has pushed the limits of a Raspberry Pi would have seen a thermometer icon in the upper right corner. A quick search finds that it is
While in the process of obtaining proof that a Raspberry Pi 3 is under-powered for certain ROS processing tasks like mapping, I took a little side trip into the world of Raspberry Pi thermal management. Anyone who has pushed the limits of a Raspberry Pi would have seen a thermometer icon in the upper right corner. A quick search finds that it is  The first useful tool is to measure temperature.
The first useful tool is to measure temperature. 
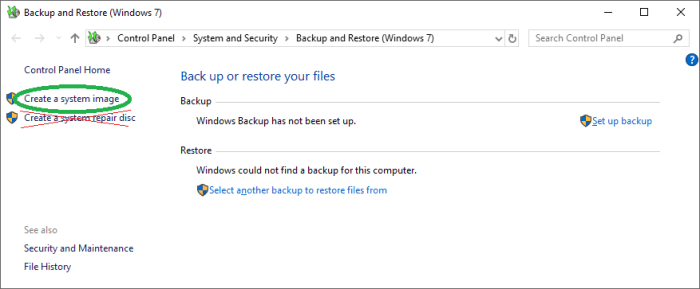 I’m sure part of the reason this backup option is less favored is because it’s a hassle to restore from. Not only does the system image backup drive need to be available, the computer needs to recover by booting with something that can make use of system image, meaning the user needs to plug in two drives to perform a recovery. (I’ve tried several times to make the “recovery boot drive” and “system image drive” the same drive and have never succeeded.)
I’m sure part of the reason this backup option is less favored is because it’s a hassle to restore from. Not only does the system image backup drive need to be available, the computer needs to recover by booting with something that can make use of system image, meaning the user needs to plug in two drives to perform a recovery. (I’ve tried several times to make the “recovery boot drive” and “system image drive” the same drive and have never succeeded.)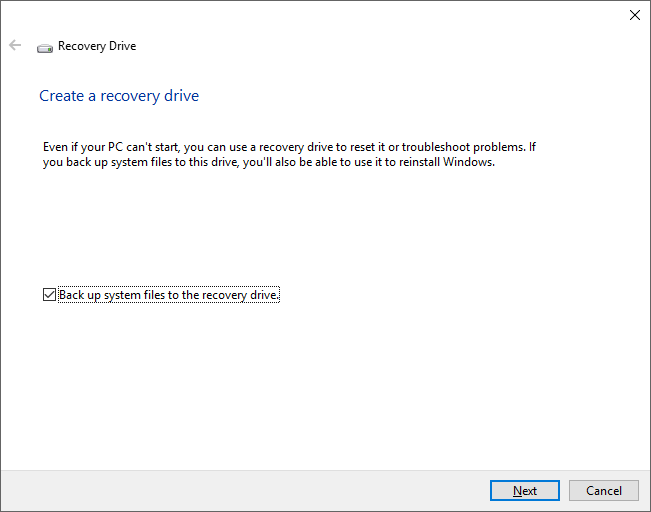

 The previous blog post outlined some points of concern against using
The previous blog post outlined some points of concern against using 



 The people at Robotis who created
The people at Robotis who created