Since it was bought off eBay, there was an obvious question mark associated with the laser scanner salvaged from a Neato robot vacuum. But, following instructions on ROS Wiki for a Neato XV-11 scanner, results of preliminary tests look very promising. Before proceeding to further tests, though, I need to do something about how awkward the whole thing is.
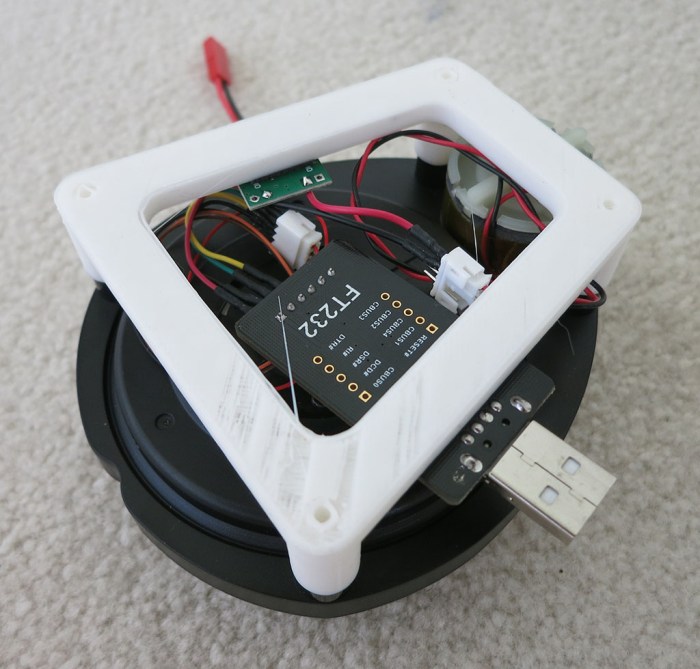
The most obvious problem are the two dangling wires – one to supply motor power and one to power and communicate with the laser assembly. I’ve done the usual diligence to reduce risk of electrical shorts, but leaving these wires waving in the open will inevitably catch on something and break wires. The less obvious problem is the fact this assembly does not have a flat bottom, the rotation motor juts out beyond the remainder of the assembly preventing the assembly from sitting nicely on a flat surface.
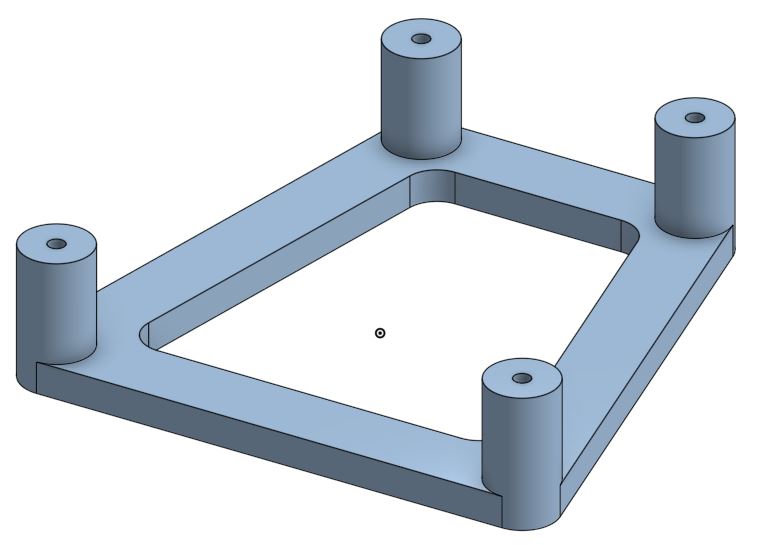
So before proceeding further, a simple base is designed and 3D-printed, using the same four mounting holes on the laser platform designed to bolt it into its robot vacuum chassis. The first draft is nothing fancy – a caliper was used to measure relative distance between holes. Each mounting hole will match up to a post, whose height is dictated by thickness of rotation motor. A 5mm tall base connects all four posts. This simple file is a public document on Onshape if anyone else needs it.
Each dangling wire has an associated circuit board – the motor power wire has a voltage regulator module, and the laser wire has a 3.3V capable USB to serial bridge (*). Keeping this first draft simple, circuit boards were just held on by double-sided tape. And it’s a good thing there wasn’t much expectation for the rough draft as even the 3D printer had a few extrusion problems during the print. But it’s OK to be rough for now. Once we verify the laser scanner actually works for robot project purposes, we’ll put time into a nicer mount.
(*) Disclosure: As an Amazon Associate I earn from qualifying purchases.
