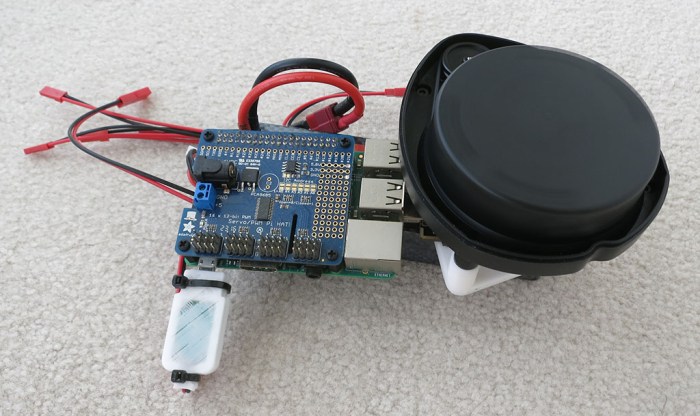
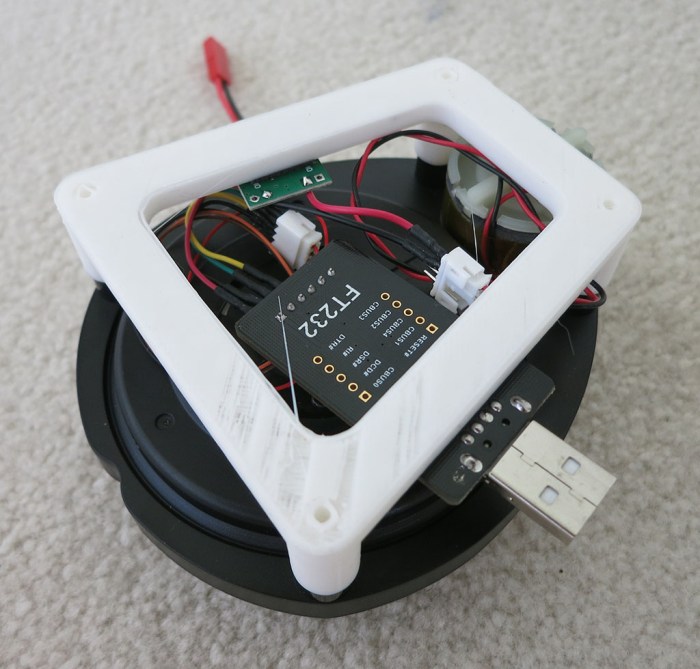
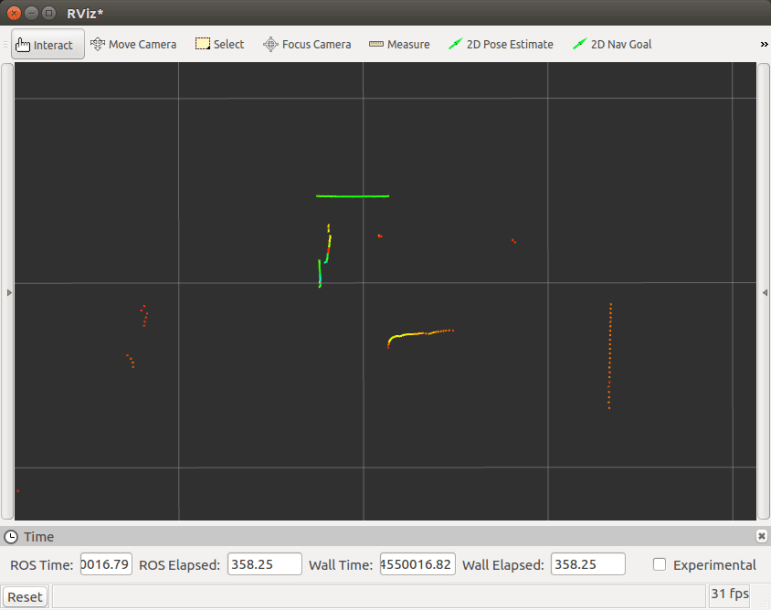
Now that the laser distance scanner has been built into a little standalone unit, it’s easy to take it to different situations and learn how it reacts by watching RViz plot its output data. First I just picked it up and walked around the house with it, which led to the following observations:
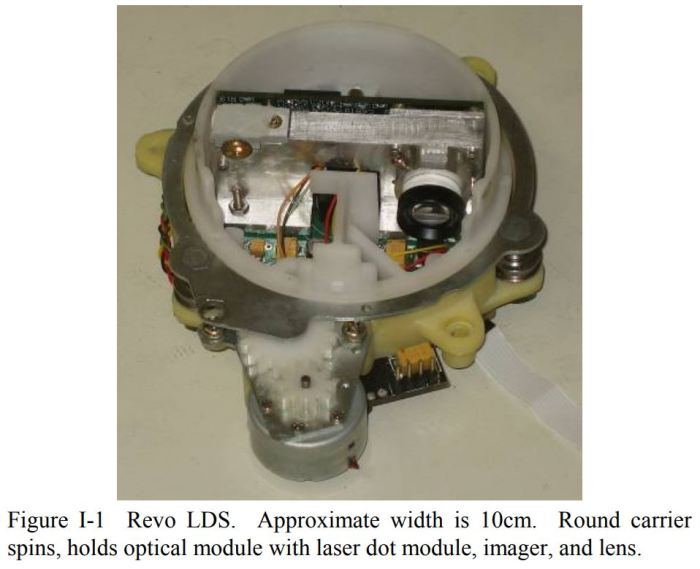
- The sensor dome sweeps in a full circle roughly four times per second. (240 RPM) This sounded pretty good at first, but once I started moving the sensor it doesn’t look nearly as good. Laser distance plot is distorted because it’s moving while it’s sweeping, visibly so even at normal human walking speeds. Clearly a robot using this unit will have to post-process distance data generated by this sensor to compensate for speed. Either that, or just move really slowly like the Neato XV-11 robot vacuum this LIDAR was salvaged from.
- The distance data is generated from a single narrowly focused beam. This generates detailed sweep data at roughly one reading per vertical degree of separation. However, it also means we’re reading just a very narrow one degree horizontal slice of the environment. It’s no surprise this is limiting, but just how limited wasn’t apparent until we started trying to correlate various distance readings with things we can see with our eyes.
Autonomous vehicles use laser scanners that spin far faster than this one, and they use arrays of lasers to scan multiple angles instead of just a single horizontal beam. First hand experimentation with this inexpensive unit really hammered home why those expensive sensors are necessary.

After the few handheld tests, the portable test unit was placed on top of SGVHAK Rover and driven around a SGVHAK workshop. There’s no integration at all…. not power, not structure, and certainly not data. This was just a quick smoke test that was very productive because it lead to more observations:
- Normal household wall paint, especially matte or eggshell, works best. This is not a surprise given that it was designed to work on a home vacuum robot.
- Thin structural pieces of shelving units are difficult to pick up.
- Shiny surfaces like glass become invisible – presumably the emitted beam is reflected elsewhere and not back into the detector. Surprisingly, a laptop screen with anti-reflective matte finish behaved identically to shiny glass.
- There’s a minimum distance of roughly 15-20cm. Any closer and laser beam emitted is reflected too early for detector to pick up.
- Maximum range is over 4-5 meters (with caveat below). More than far enough for a vacuum robot’s needs.
The final observation was unexpected but obvious in hindsight: The detection capability is affected by the strongest returns. When we put a shiny antistatic bag in view of the sensor, there was a huge distortion in data output. The bag reflected laser back to the scanner so brightly that the control electronics reduced receiver sensitivity, similar to how our pupils contract in bright daylight. When this happens, the sensor could no longer see less reflective surfaces even if they were relatively close.
That was fun and very interesting set of experiments! But now it’s time to stick my head back into my ROS education so I can make use of this laser distance sensor.
 I bought a laser scanner salvaged from a Neato robot vacuum
I bought a laser scanner salvaged from a Neato robot vacuum 

