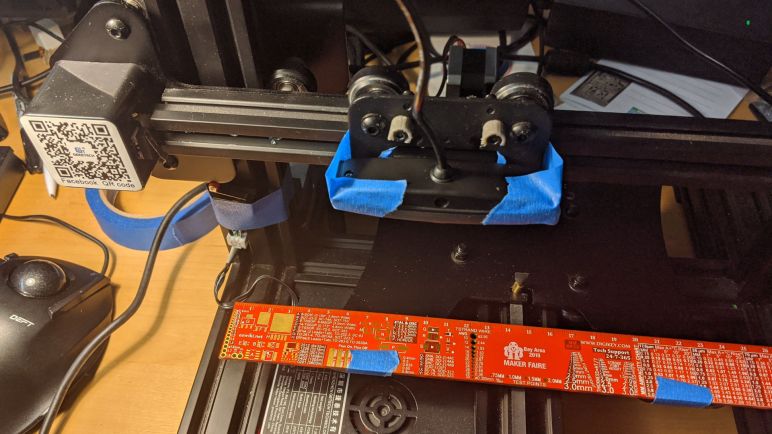
My project to squish a packing material air bubble was a simple Hello World type of exercise done with what I already had on hand. Part of this meant pushing on the bubble with bare metal plate of the retired Geeetech A10 X-axis carriage. This (probably stamped) piece of metal used to hold a 3D printing nozzle, but that component is absent when I received this gift. I don’t know the history, only that I can see a few pieces of plastic remained.

While using this plate directly was enough for an air bubble exercise, I knew I’ll eventually need to attaching something more functional to this carriage. What would that something be? I have no idea! It will likely depend on the specific project at hand, and thus highly variable.
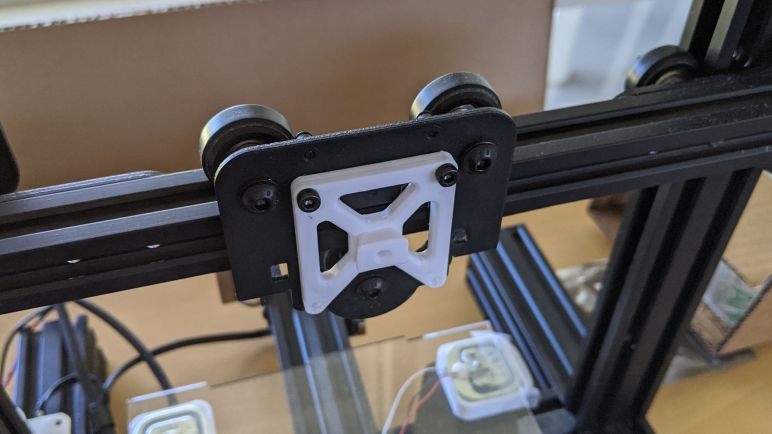
Which naturally led to the thought of a modular system where I have a fixed base bolted to this carriage and a set of quick-switch accessories for a wide variety of tasks that can be easily swapped out as needed. I thought I could accomplish this by a little dovetail that accessories could grip onto.
Things did not go well. I made a mistake in measurement, so the bottom screw holes didn’t fit. But even ignoring that, the dovetail turned out to be far too small and my test placeholder accessories were too wobbly. There’s a lot more to an interchangeable tool head than just printing a dovetail, perhaps I should adopt an existing open source tool changer for the next draft rather than try to reinvent this particular wheel.
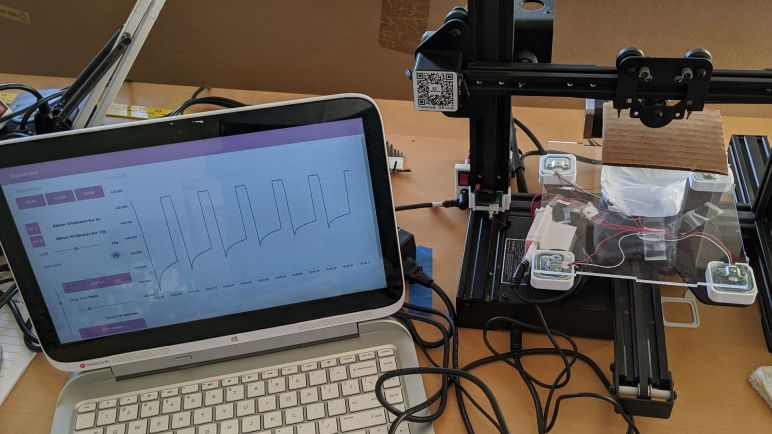

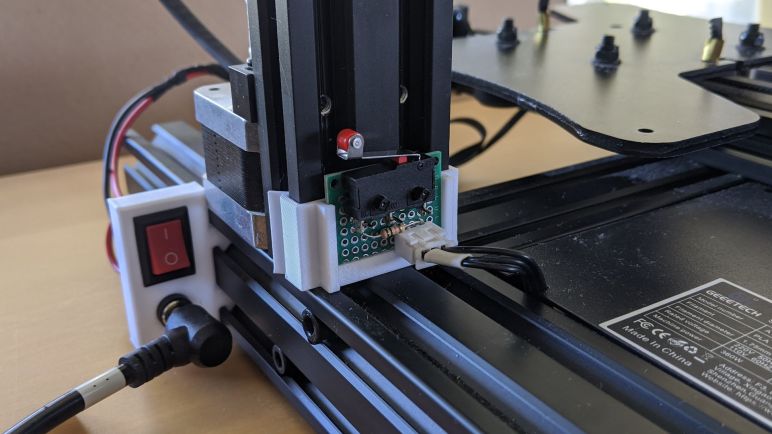

 Once I had a small circuit board to hold the switch wired to the appropriate
Once I had a small circuit board to hold the switch wired to the appropriate 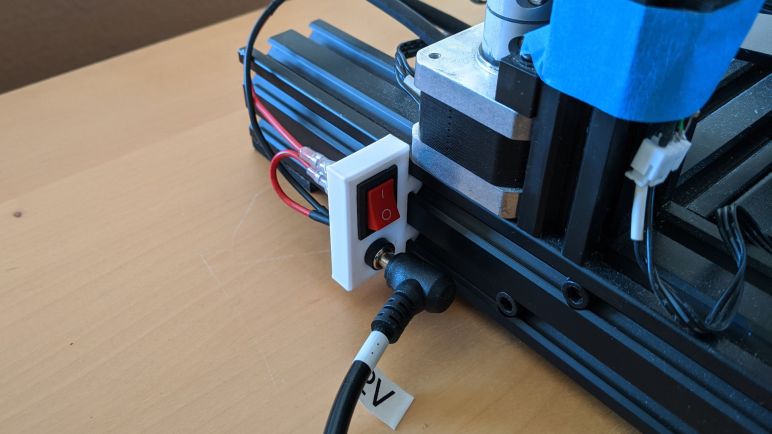
 A reduced top speed was still good enough for me to proceed so I drew up a quick 3D printable power panel for the printer. Since the 12V DC power supply was from my
A reduced top speed was still good enough for me to proceed so I drew up a quick 3D printable power panel for the printer. Since the 12V DC power supply was from my