After some debugging and re-awakening, I brought the laptop running UGS back to the workshop and this time it mostly worked. There were still a few unexplained system freeze-ups early in the work session but it was stable afterwards. Was there something weird with Java runtime settling down? I’m not sure, but I’ll have to keep an eye out to see if this recurs upon every system bootup.
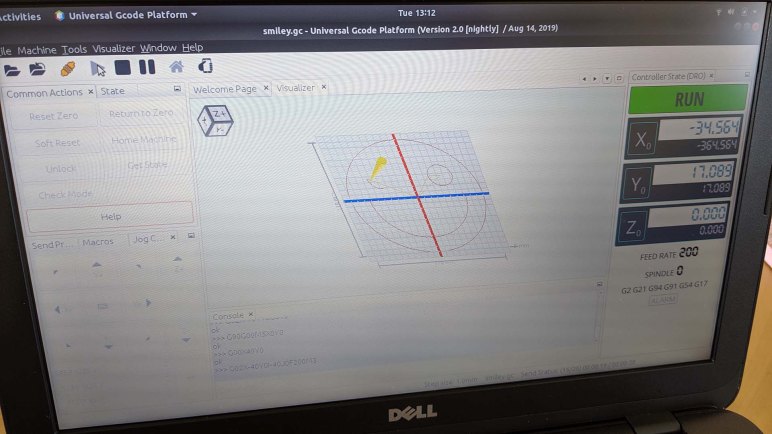
Having a computer running UGS proved useful because we now have a 3D visualization of G-code tool path. It allowed us to see where a particular program declared its origin, so we could set work coordinate zero accordingly. It also allowed us to debug a few problems with the G-code we’ve randomly found online. The smiley face, for example, issued a G54 command early in the program but Grbl didn’t like that upon rerun and demanded a G0 before it.
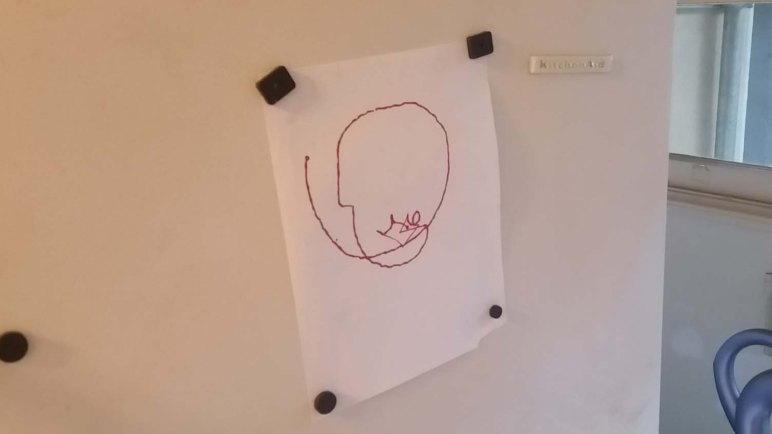
Running G-code programs repeatedly to debug UGS settings meant we had ample opportunity to goof around with more drawings.
While fun, this “let’s act like a crappy Z-axis” game is not the point of the project. We know we need some sort of structure to fasten a Z-axis mechanism to. We hunted around the workshop for items collecting dust and found a set of 40mm x 40mm aluminum extrusion beams along with associated hardware. Formerly some sort of display for trade shows, it has been retired and available for use.
For the first draft we just want something better than holding the pen by hand, so we weren’t picky. Not really understanding what we wanted also meant we were reluctant to cut into these beams destructively until we know better. This meant using the lengths as-is and playing with various arrangements. C-clamps were very useful to temporarily hold pieces in place! Eventually we had enough of a plan and the clamps were replaced with bolts.



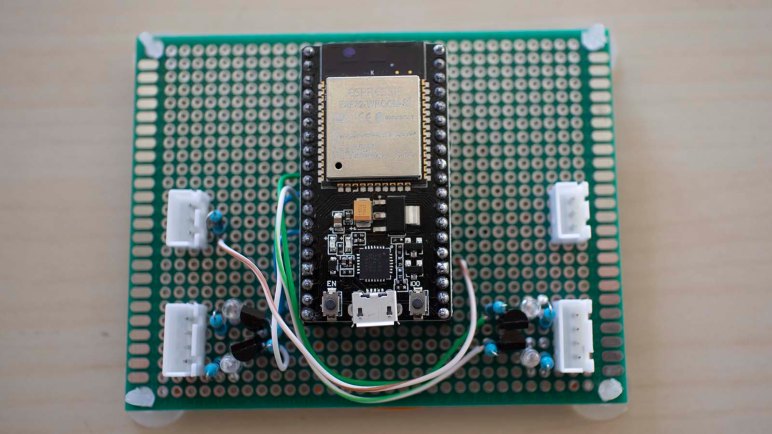





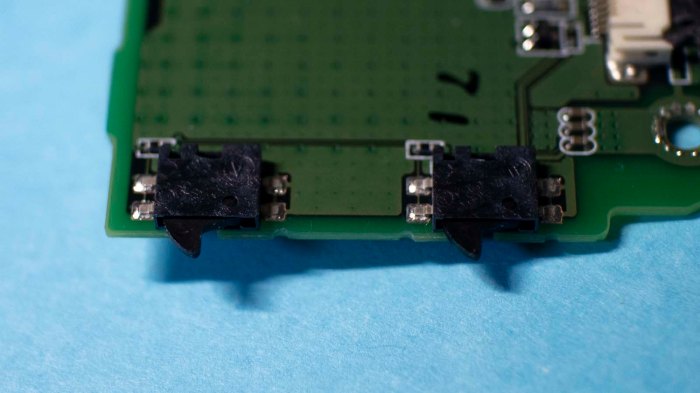

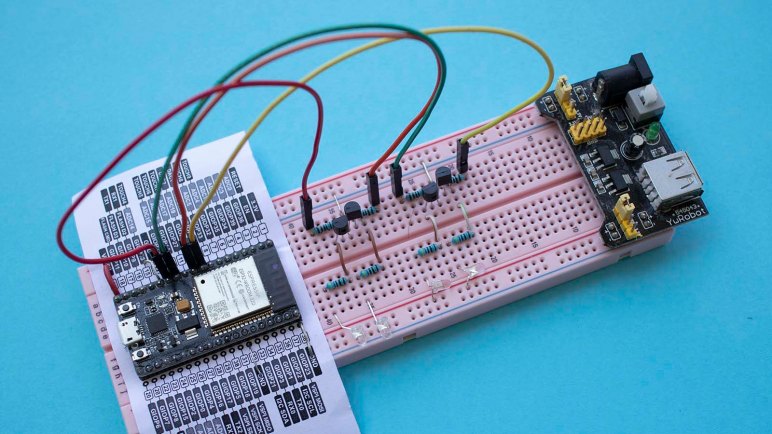
 There is slightly less solder than I would have preferred on each of these joints, but several efforts to add solder created solder bridges across pins. Requiring removal by solder sucker, which reduced the amount of solder even more. Since there was enough for electrical conductivity, I left it as is to
There is slightly less solder than I would have preferred on each of these joints, but several efforts to add solder created solder bridges across pins. Requiring removal by solder sucker, which reduced the amount of solder even more. Since there was enough for electrical conductivity, I left it as is to