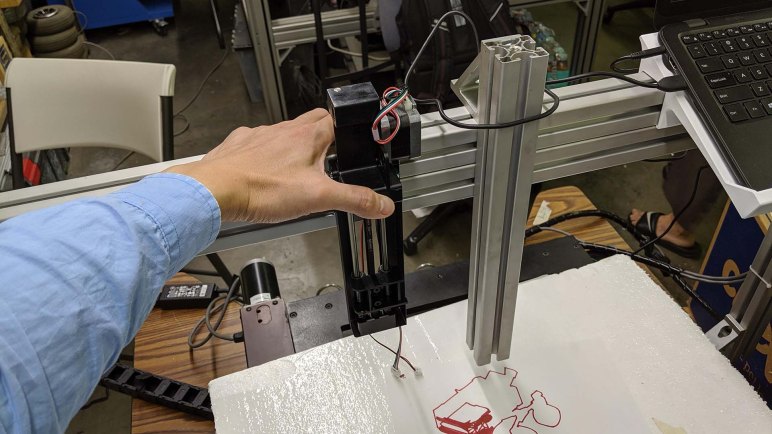
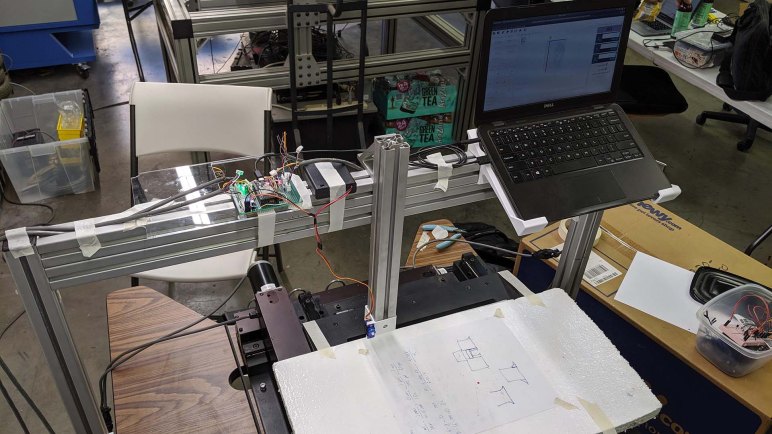
Wiring was never my favorite part of a project, but it needed to be done. A lot of it at that. After the latest plotter test, I picked up the next item on the to-do list: the 12V power supply for Z-axis. It was just set on the table for testing the second and third iteration of Z-axis, held only by gravity which meant it started shifting position and threatened to fall off the edge when the XY stage movement hit the table’s resonance and everything started shaking. We should mount it rigidly on some part of this machine.
My first thought was to 3D print a bracket for this power supply, and mount it to one of the aluminum extrusion beams. But then I thought it would make more sense to put it alongside X and Y axis control boxes which are combination power supply and stepper driver modules. I’ll mount the Z-axis power supply here, but I’ll hold off moving the stepper drive here as well since that would involve re-routing many more wires.

I drill three holes in the metal panel mounted below the table for X and Y axis driver modules. Even after the 12V power supply was bolted in place, there’s plenty of room left on this panel for the Z-axis stepper driver in the future, and possibly also the ESP32 control board. This is the eventual destination for all electrical components, but one step at a time. Of course, it would help if I don’t keep changing parts of the machine…

 Which means we’re not going to drill into aluminum for mounting holes just yet, we’ll get started with a
Which means we’re not going to drill into aluminum for mounting holes just yet, we’ll get started with a