The tallest object on Mars rover Curiosity is a camera and sensor array mounted on top of a mast. During Curiosity’s journey from Earth to Mars, this mast was folded down for transport. As a motorized model of the rover, Sawppy will also feature a sensor-topped mast. And while packaging constraints aren’t as strict for a hobbyist rover model, it would still be very convenient to fold the mast for transport.
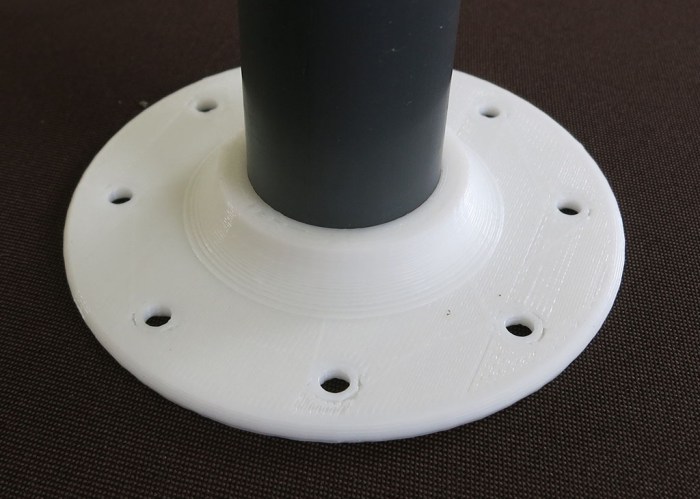
As a simple first draft, we’ll have a fixed non-folding mount for the camera mast, which is a piece of PVC pipe. This will serve as the fallback solution. If Sawppy doesn’t get an elegant folding solution, I could at least pull the PVC out of this non-folding mount for transport.
With a fallback in place, let’s set goals of this project:
- Use PVC pipe for mast structure.
- Hollow center to run wires.
- Fold and unfold without use of tools.
- For sake of camera image, mast must be stable when raised.
- Stability less important when mast is lowered.
- Leverage natural flexibility of plastic to hold movable things in position.
The last bullet point turned out to be more difficult than expected. Our world is full of plastic spring clips, and familiarity lead to an incorrect impression it would be easy. It actually takes a fine control over dimension tolerances to make a plastic clip that flexes to allow movement yet clips tightly for a stable position. We also need good control over surface finish to create a mast hinge that rotates smoothly. Both are within reach of hobbyist level 3D printer but it takes effort.
The first few iterations focused on a rigid cylindrical collar over the end of the PVC pipe, and a U-shaped mounting block on the body that clips onto that collar. The basic concept is for the U-shaped mounting block to have indents that favor two collar positions. Raised mast and 90-degrees rotated lowered mast. The U should be flexible enough to allow the collar to rotate between these two positions, but rigid enough to hold collar position once it reached one of the indents, plus a smooth surface finish so collar rotates well between the positions. This proved challenging and all of these iterations were either too stiff to be moved, or didn’t hold tightly enough after mast is deployed.

After these failures trying to make a mounting block that can balance rigidity and flexibility requirements, the requirements were split up to separate parts so each can focus on their job. The mounting block will focus on being rigid, and springy flexibility will be delivered by a separate external clip.
This second design also had a back-up provision for a screw to hold PVC collar in place. This would fail to meet the tool-less requirement but it didn’t take much effort to add to the experiment. It turns out the screw position had too little leverage to hold things in place anyway.
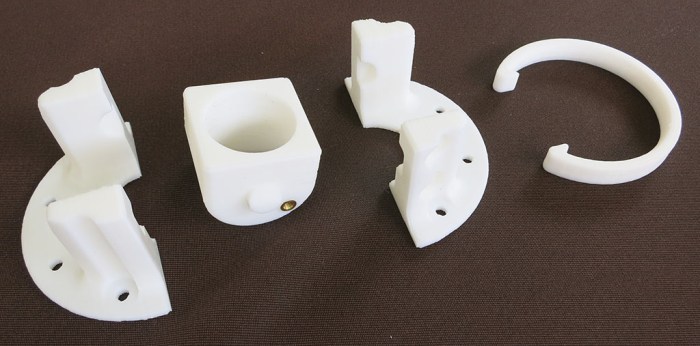
Since this mount block and PVC collar worked well enough to deliver rotational motion, design iteration focused on evolving the spring clip design. The clip got bulkier to help reinforce rigidity of the mounting block, but it also had a flexible clip for the PVC pipe placed so it had good leverage to hold the pipe in place without compromising the collar’s ability to reinforce the mounting block.
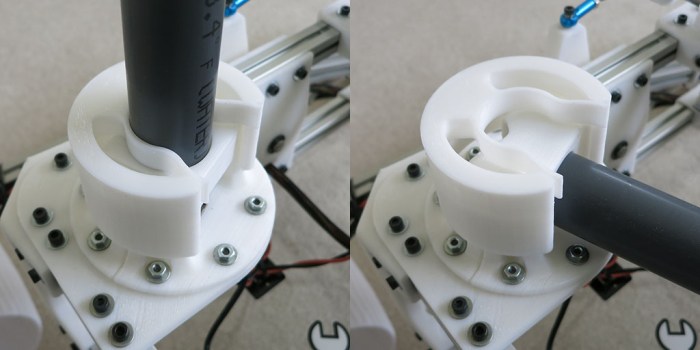
This is still really crude but it covers the basic functional requirements. It’ll be good enough for Sawppy’s first public appearance at JPL. In fact it was good enough to elicit delighted appreciation from a JPL engineer whose day job is running the real mastcam on Curiosity. Of course, she told me I should motorize my mast mechanism because her real mastcam does. Maybe in a future iteration! I definitely intend to put more effort into polishing this mechanism.
