
Power distribution is a concern in any electronics project, but a breadboard ESP32 circuit mounted on a cardboard box rover stand-in has an additional twist: USB. When a USB cable is plugged in to my ESP32 dev kit to upload new firmware and serial monitoring, it is also connected to the computer’s +5V power rail. But when my rover is out and about on its own, that USB connection will be absent and ESP32 will have to draw power from the onboard battery.
I initially thought I would have to install a 5-volt regulator on my rover to power the ESP32, much as how I had been using MP1584 buck converters to power Raspberry Pi 3 for earlier projects such as Sawppy V1. Then I remembered the ESP32 is a 3.3V part so there must already be a voltage regulator of some sort on the dev kit. Looking on the board and confirmed on the schematic, there is a AMS1117-3.3 LDO (low drop-out) regulator on duty. These regulators are happy to accept voltage up to 15V and down to as low as 1.3V over the output voltage, which in this case is 3.3 + 1.3 = 4.6V.
Looking over the schematic that HiLetgo bundled with this ESP32 dev kit, I see the onboard USB serial interface chip also runs on the 3.3V regulator output. Another thing this “Vin” pin is connected directly to is the power LED, which has a 1k current-limiting resistor so it can tolerate higher than 5V of input.
So that leaves the USB cable’s +5V line. If I have battery power voltage on that VIN pin, I don’t want that voltage to feed into my computer’s USB port. I need to make sure this ESP32 can connect to USB or battery power but never both at the same time. My solution is to use a length of solid-core wire to bridge battery power input to the Vin pin, and shaping the wire so it blocks the USB port. This way, I can’t connect this wire while the USB plug is in use.
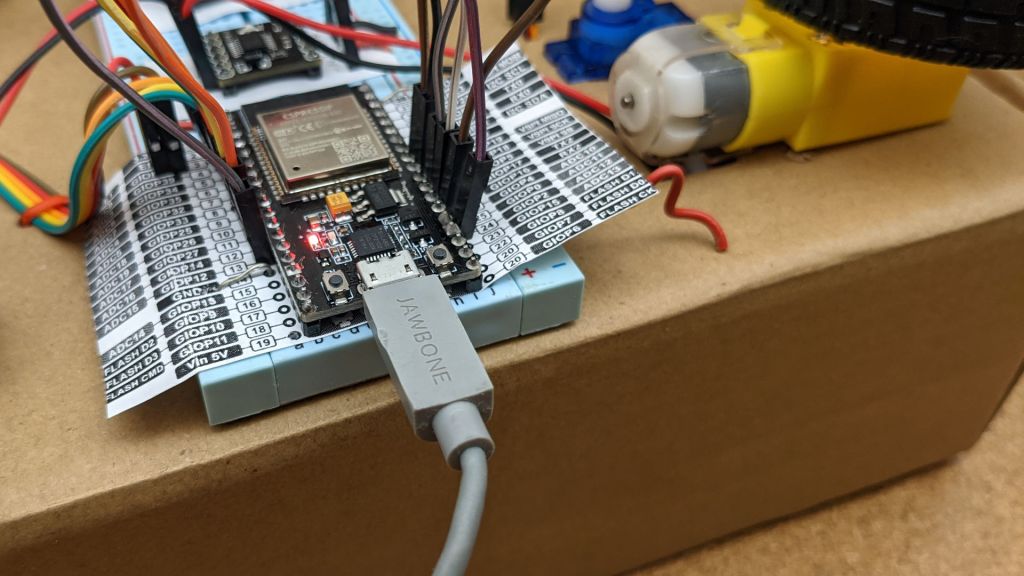
In order to use USB power, I have to disconnect the VIN wire and swing it out of the way like a gate. In order to make sure that battery voltage wire doesn’t touch anything inconvenient while it is out of the way, I stabbed the exposed solid core wire into cardboard to tie up that literal loose end.
None of the remaining components on the rover testbed will need to receive software updates over USB, so this is the only place where I had to worry about switching between two power sources. Everything else will be wired directly to battery power.
