I pulled out my old Samsung 500T to see if it could run ESA’s ISS tracker. It could, and quite well, so I think the role might be the best use of this machine. Because it has proven to be a huge disappointment in so many other ways.
I knew of the machine when it launched alongside Windows 8. This was when Microsoft also launched the original ARM-powered Surface tablet to demonstrate what’s possible by using ARM chips: look at how thin and light they are! Samsung & friends launched the 500T as counterpoint: just as thin and light as the Windows RT tablets, but with an Intel CPU for full x86 compatibility. Judging by the spec sheet, it was a spectacular device to undercut and humiliate the “Windows on ARM made thin and light possible” story.
But that’s only on the spec sheet and not on the price tag. The 500T was expensive and Surface tablets sold for far less. Due to that fact, I didn’t get my 500T until much later when it showed up as a secondhand refurbished unit on Woot. When it arrived, I was sure there was something wrong with the machine. Maybe it somehow slipped past testing in refurbishment? It was completely unusable, taking several minutes to boot and user commands took many seconds (5-10) to respond or were ignored entirely. I went online and found a firmware update, which took all night to apply and upgraded performance from “disastrous” to “merely horrible”.
The screen was another cool feature that didn’t panned out. Not just a touchscreen for fingers, it was also a pen digitizer. Compatible with passive Wacom stylus used by the much thicker Surface Pro tablet, the 500T also had a tiny stylus holder built in. It held the promise to be a digital sketchpad with pressure sensitivity making it superior to a contemporary iPad. But slow system response killed that dream. Who wants to sketch on a pad when strokes don’t show up until a few seconds after we draw it?
Judging by Windows Task Manager, this device’s major implementation flaw was its eMMC flash storage, constantly showing 100% activity. The Atom CPU was not exactly a stellar performer, but it wasn’t the reason for delay as the 500T was constantly waiting to read from or write to storage. Generally ruining user experience across the board.
Not to let Intel entirely off the hook, though, as its Atom Z2760 CPU turned out to be a long term liability as well. This CPU was part of Intel’s Clover Trail family, and they had problems running Windows 10 features newly introduced in 2016. Intel had discontinued that line and declined to do anything about it, so Microsoft blocked Clover Trail devices from advancing beyond Windows 10 build 1607. They will still receive security fixes until January 2023, but features are stuck at July 2016 levels forever.
All of the above are things that I might be able to overlook as unfortunate result of things outside Samsung’s control. The eMMC storage might have performed well when new but degraded with time as solid state storage sometimes do. (The TRIM command could help, but they had to make use of it.) And Samsung had no way of knowing Intel would just abandon Clover Trail.
But let’s talk about what Samsung have chosen to install on the machine. As is typical of machines around that age, there was the usual useless bucket of trials and discount offers. There are also Samsung features that duplicate existing Windows functionality, others thinly veiled advertisement for Samsung products, and more. The worst part? I could not get rid of them. I thought they would be gone once I wiped and installed Windows 10, but they were bundled with critical device drivers so I had no choice but to reinstall them as well. Holding device drivers hostage to force users to accept unrelated software is consistent with Samsung’s anti-user behavior I saw across the board.
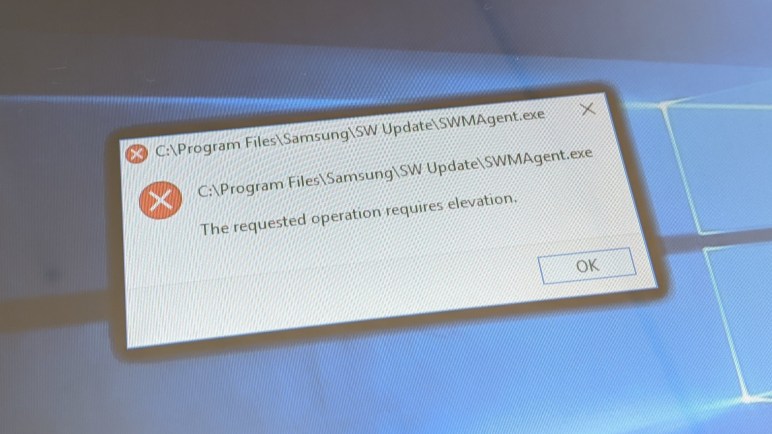
The image at the top of this post is just one example. SWMAgent.exe appears to be some sort of Samsung software update engine (What’s wrong with Windows Update?) and it asks for elevation. If the user declines to grant elevated privileges, the software is supposed to respect that choice and go away. But not Samsung! We see a black border visible around that dialog box, which might look strange at first glance. Windows 10 adds a subtle dark shadow to dialog boxes, why this ugly black thing? It is because we’re not looking at a single SWMAgent.exe dialog box, but a huge stack of of them. Each popping on top of the last, and another one added every minute or so. The thick black border is a result of that subtle dark shading stacked deep and combining, because Samsung would not take no for an answer.
I don’t need that in my life. The upside of this machine being disappointing was that I had no motivation to put up with it. Into the unused bin it went, and I haven’t bought a Samsung computer since.