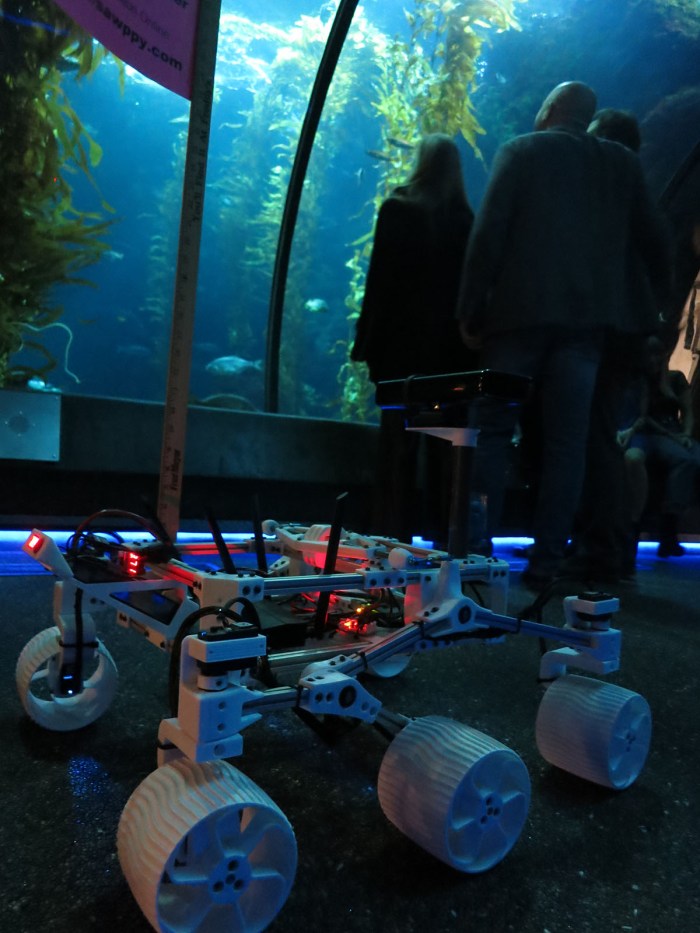
One of the problems I didn’t foresee in designing Sawppy was that some children might see a fun challenge in doing running jumps over my rover. I first saw this unwelcome behavior when I brought Sawppy to Long Beach, and I knew it’d only be a matter of time before a child would misjudge their jump and smash Sawppy into a pile of broken rover pieces.
Clearly I need to find some way to discourage this behavior, but I also can’t do anything that physically harms misbehaving children. This eliminates straightforward solutions such as a Samurai blade pointing straight up. I would also like this countermeasure to be stealthy and not call attention to its anti-jump purpose otherwise some would see it as a challenge.
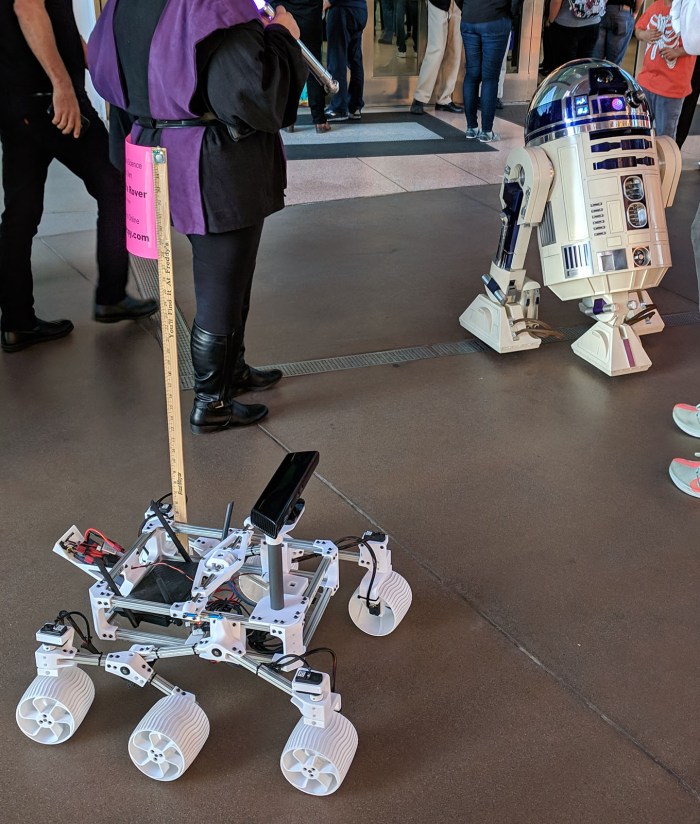
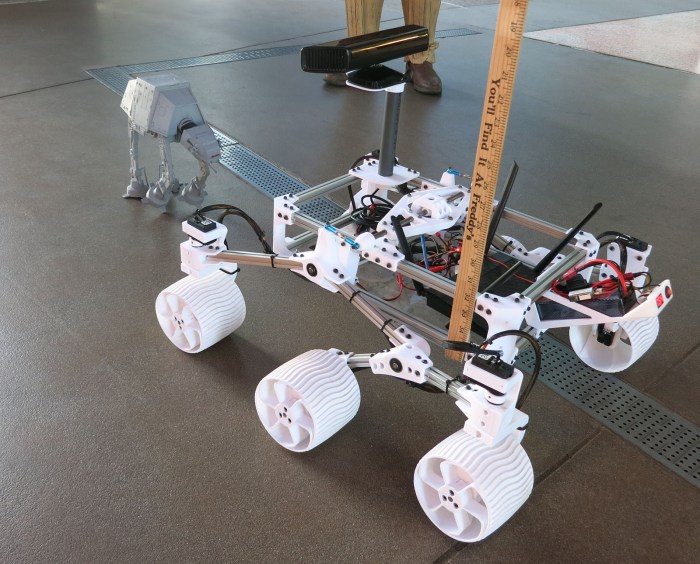
The answer came while preparing for this year’s Southern California Linux Expo (SCaLE 17x). I was scheduled to host the Hackaday x Tindie Birds of a Feather meetup, and I was also slated to co-present a talk with Lan Dang. For publicity purposes I decided Sawppy can be a rolling billboard, as SCaLE is exactly the right audience of people who would pay attention to a 3D-printed rover running about. I pulled out a yardstick I had on hand and started planning how to use it as a flag pole, and I immediately knew I had my anti-jumpover countermeasure as well. Two birds, one stone.

As previously mentioned, I didn’t want this flag pole to be too rigidly attached. If someone bumps my sign, or if someone decides to try jumping over my rover anyway, the flag pole must break away cleanly without damaging the person or the rover. For SCaLE I used a zip tie that was arranged so there is tension holding the yardstick flag pole in place, but pops free when stressed.
This mostly worked, but as it was built on a balance of opposing forces, it was finicky to reinstall. At Caltech Science for March, a curious toddler yanked off the flag pole and the toddler’s supervising elderly adult tried to reinstall the pole. But grandpa had no idea what he was doing, blindly stabbing inside Sawppy’s equipment bay with the yardstick applying more force as he grew more agitated. After two attempts at saying “Don’t worry, I’ll put it back myself” while I watched in horror at Sawppy electronics getting pummeled, I forcibly grabbed the yardstick from his hands in order to save Sawppy from being stabbed to death.
A better solution must be found.
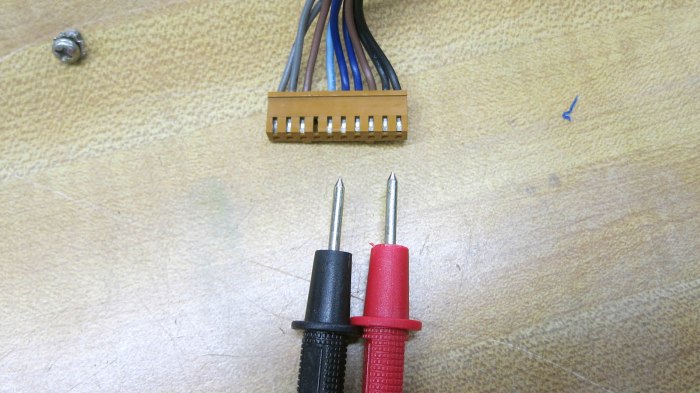
In preparation for Sawppy’s appearance at Yuri’s Night, I decided to try a magnetic mounting system. Originally rejected because I thought it wouldn’t be strong enough, I thought it was worth a second look. I had a stack of these powerful little magnets and a single pair wasn’t able to hold the pole. But four pairs of them might be strong enough for the task.
For this test, four magnets were held on to chassis beam via packing tape. Two on upper beam, two lower.
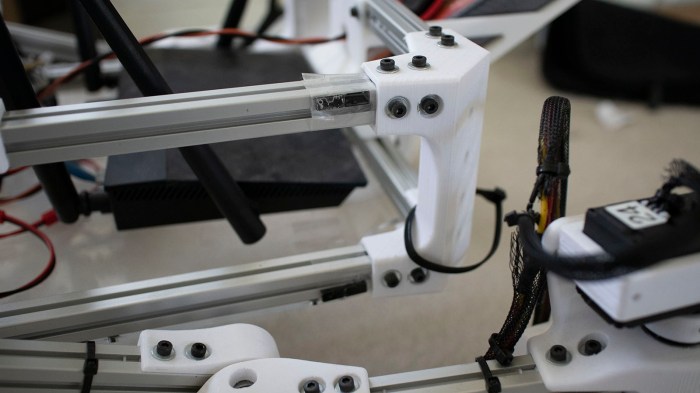
Matching sets were held to yard stick flag pole with more tape.

With updated camera mast and flag pole mount, Sawppy was ready for its next public appearance at Yuri’s Night Los Angeles! That event got crowded at times and there were a few accidental bumps that triggered a clean separation followed by quick re-installation. And while this adult-focused event had few children about, there were plenty of drunken misbehaving adults. The flagpole did not discourage all misguided behavior, but it has worked well enough to become a permanent fixture of my future Sawppy public appearances.

(Cross-posted to Hackaday.io)

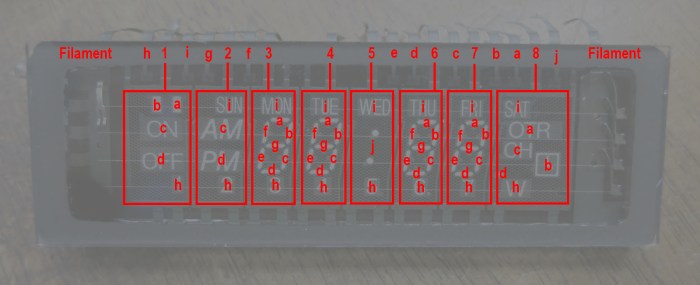
























 Now that I have some idea of what happens inside
Now that I have some idea of what happens inside