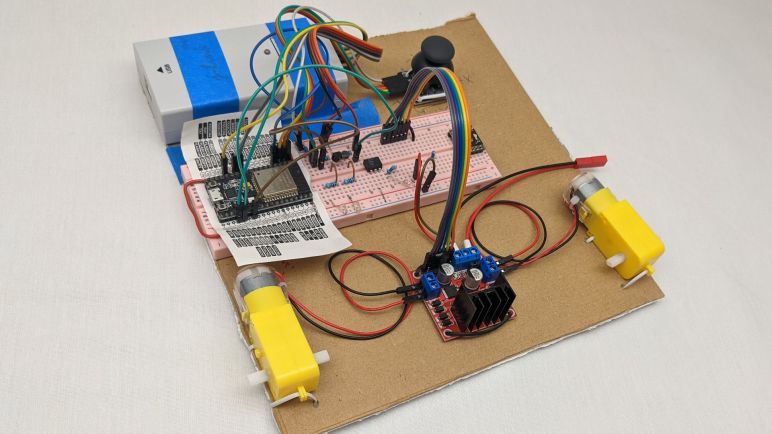
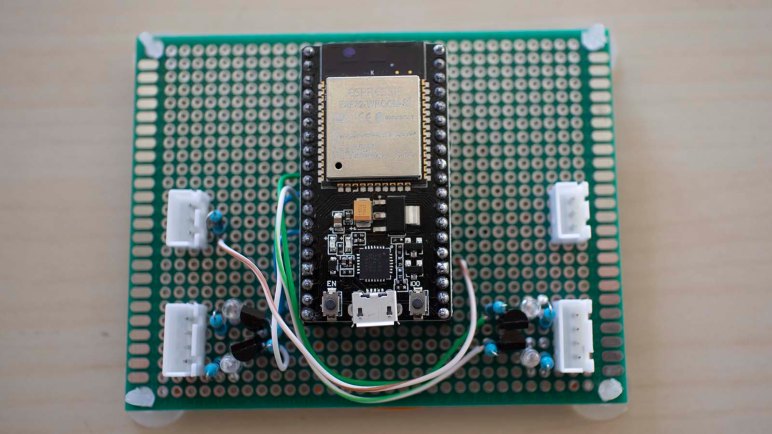
My quick ESP32 motor control project was primarily to practice software development for FreeRTOS basics, but to make it actually do something interesting I had to assemble associated hardware components. The ESP32 development kit was mounted on a breadboard, to which I’ve connected a lot of jumper wires. Several went to a Segger J-Link so I had the option of JTAG debugging. A few other pins went to potentiometers of a joystick so I could read its position, and finally a set of jumper wires to connect ESP32 output signals to a L298N motor control module. The L298N itself was connected to DC motors of a pair of TT gearboxes and a battery connector for direct power.
This arrangement resulted in an annoying number of jumper wires connecting these six separate physical components. I started doing this work on my workbench and the first two or three components were fine. But once I got up to six, things to start going wrong. While working on one part, I would inadvertently bump another part which tugs on their jumper wires, occasionally pulling them out of the breadboard. At least those pulled completely free were clearly visible, the annoying cases are wires only pulled partially free causing intermittent connections. Those were a huge pain to debug and of course I would waste time thinking it was a bug in my code when it wasn’t.
I briefly entertained the idea of designing something in CAD and 3D-print it to keep all of these components together as one assembly, but I rejected that as sheer overkill. Far too complex for what’s merely a practice project. All I needed was a physical substrate to temporarily mount these things, there must be something faster and easier than 3D printing. The answer: cardboard!
I pulled a box out of my cardboard recycle bin and cut out a sufficiently large flat panel using my Canary cutter. The joystick, L298N, and TT gearboxes had mounting holes so a few quick stabs to the cardboard gave me holes to fasten them with twist ties. (I had originally thought to use zip ties, but twist ties are more easily reused.) The J-Link and breadboard did not have convenient mounting holes, but the breadboard came backed with double-sided adhesive so I exposed a portion for sticking to the cardboard. And finally, the J-Link was held down with painter’s masking tape.
All this took less than ten minutes, far faster than designing and 3D printing something. After securing all components of this project into a single cardboard-backed physical unit, I no longer had intermittent connection problems with jumper wires accidentally pulled loose. Mounting them on a sheet of cardboard was time well spent, and its easily modified nature makes it easy for me to replace the L298 motor driver IC used in this prototype.



 Once upon a time I decided it was a good idea to turn an old laptop screen into a
Once upon a time I decided it was a good idea to turn an old laptop screen into a 















{kind=link}