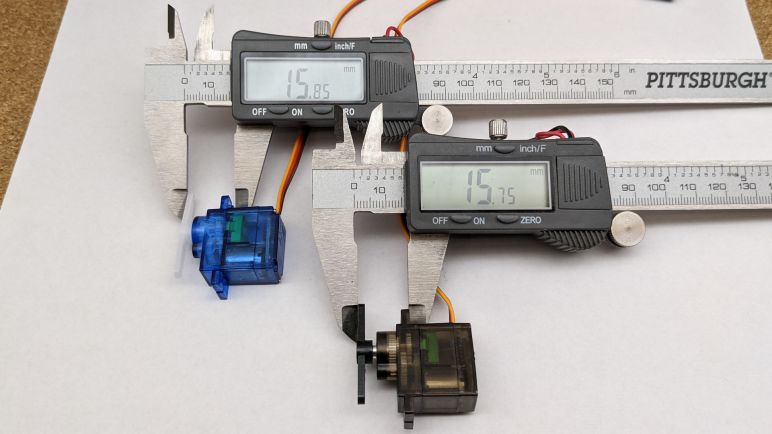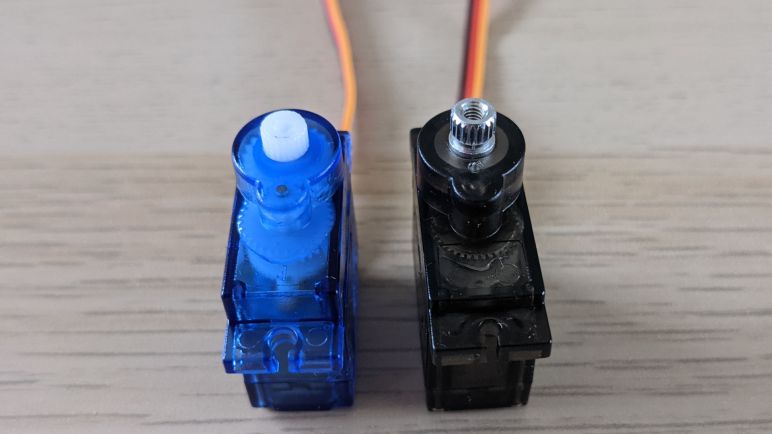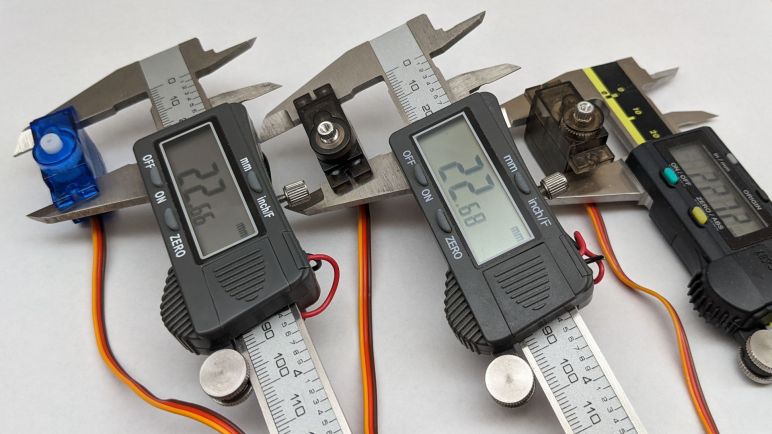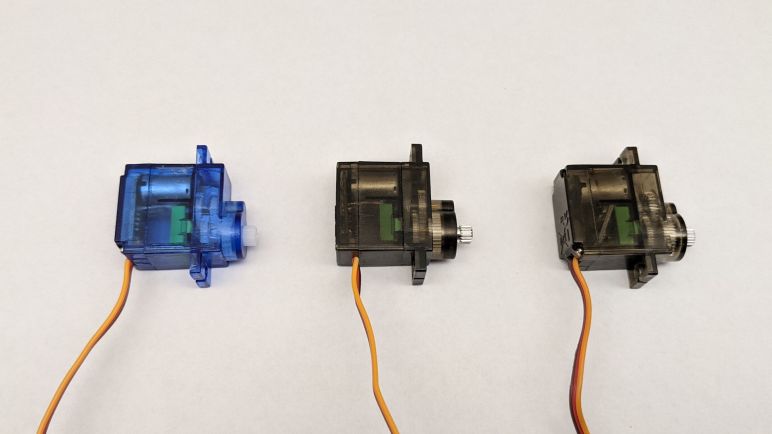
I want to design a smaller and affordable variant of my Sawppy rover. I’ve been looking over the mechanical and electronic properties of micro servos I intend to use as the little rover’s actuators. They represent the biggest mechanical unknown due to the variations between products in this generic category. Thankfully, consistency is much better in the other mechanical part impractical to 3D-print: ball bearings.
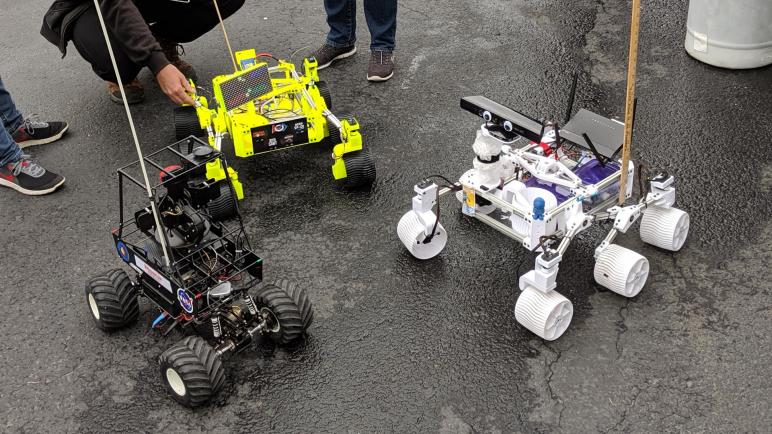
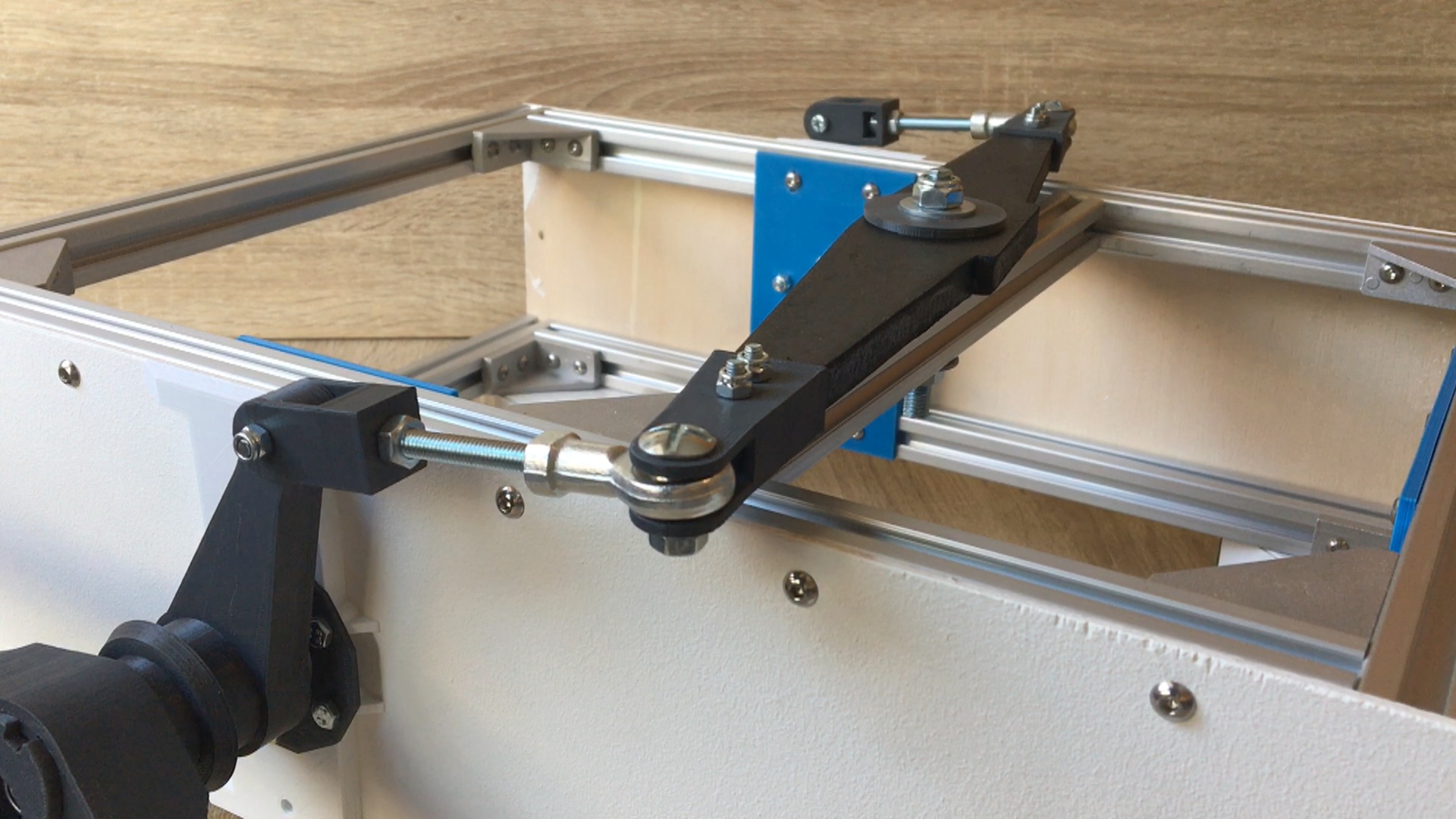
Using ball bearings are apparently “My Thing” when it comes to designing and building rover models. When I reviewed other rover projects earlier, several didn’t use ball bearings at all, and most of the rest only used ball bearings on a subset of rotational axes. I want to put them everywhere I can!
Every rotational axes of Sawppy V1 were supported by ball bearings that went by the designation 608. I first came into contact with this type in the context of rollerblades, and they’re popular in other related wheeled footwear such as roller skates and skateboards. However, 608 bearings would be unnecessarily large for a little rover, so I went back to the well of mass-produced commodity ball bearings to find something suitable for a smaller rover.
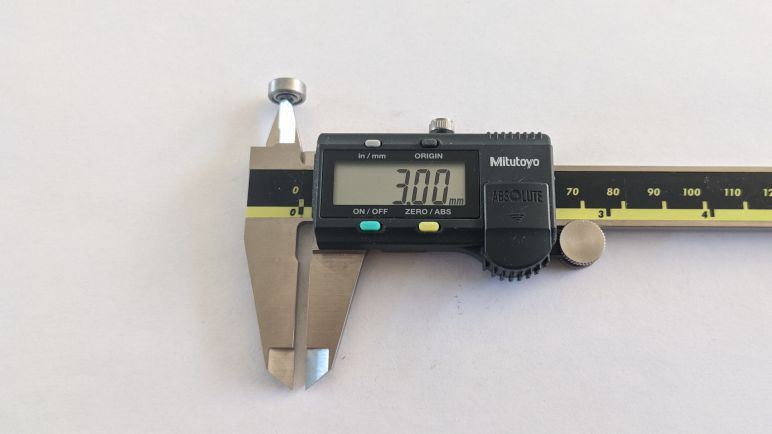
My primary criteria is an inner diameter of 3mm, because I thought M3 would be a good fastener to use for the little rover. It is a metric standard commonly available worldwide. M3 fasteners were also used extensively in Sawppy V1, but they were on the small side so I compensated with sheer numbers. That was a design decision I regretted and want to fix in the future. For the little rover, M3 would be relatively big and strong so I would only need a few of them.
There are several different common bearing types with a 3mm inner diameter, and an unscientific poll of Amazon vendors hinted the 623 bearings (*) are the most popular and least expensive among them. I thought it was interesting that they were still more expensive than the batch of 608 bearings I bought (*), and I take this to mean that significantly more 608 bearings are produced than 623. Either that or I have yet to find the right outlets. A little rover can happily use cheap 623 bearings that have failed rigorous quality assurance tests for industrial use, as those “bad” bearings will still be far superior to nothing at all. But for now I’ll be content with the lowest bidder of the day. (*)

Like 608 bearings, the letters and numbers surround 623 designate various other related features, such as how the ball bearings are shielded from the environment. But 623 itself is the important part here, as it describes an inner diameter of 3mm, outer diameter of 10mm, and thickness of 4mm. And generic 623 bearings will follow these dimensions much more tightly than generic micro servos adhere to their mechanical dimensions. Which is one less thing to worry about when I already have to compensate for varying dimensions of 3D-printed plastic that will host these bearings.
(*) Disclosure: As an Amazon Associate I earn from qualifying purchases.