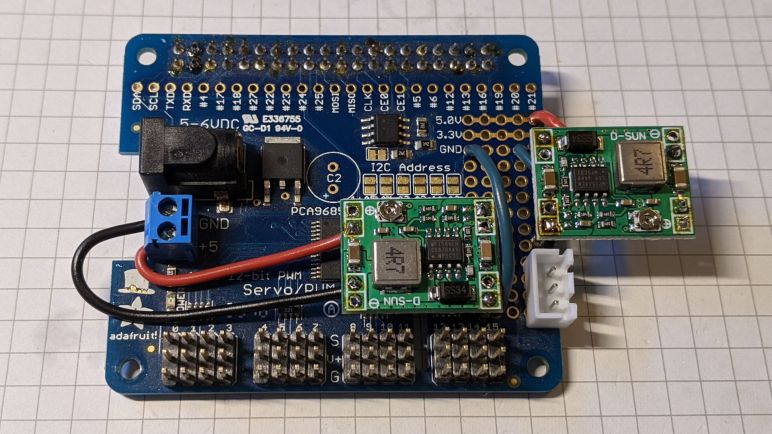
The electronics components I had used to get Micro Sawppy Beta 1 (MSB1) up and running are not representative of my final ambitions. It has a Raspberry Pi 3 with microSD card, the Adafruit PWM/Servo HAT plus two MP1584 buck converters. The upside of this system is simplicity of assembly: thanks to Adafruit, their HAT is close to plug-and-play with a Pi. And if someone uses another power solution, they might not need to solder those MP1584 converters. The servos, for example, could have been powered by a 4- or 5-pack of AA batteries.
The downside is that a remote-control toy rover is really only using a tiny fraction of the capabilities of this system, and these tasks can be done with something simpler and less expensive. For Sawppy V1 I wanted to leave headroom for explorations into autonomy, but it’s been a lot of fun even without that. So I’m OK with downsizing for a micro Sawppy as long as there’s an upgrade path. Whether it be Raspberry Pi, Ardupilot, or some other advanced controller. I still want to make micro Sawppy more affordable, but it’ll be a balance between low cost against ease of assembly.
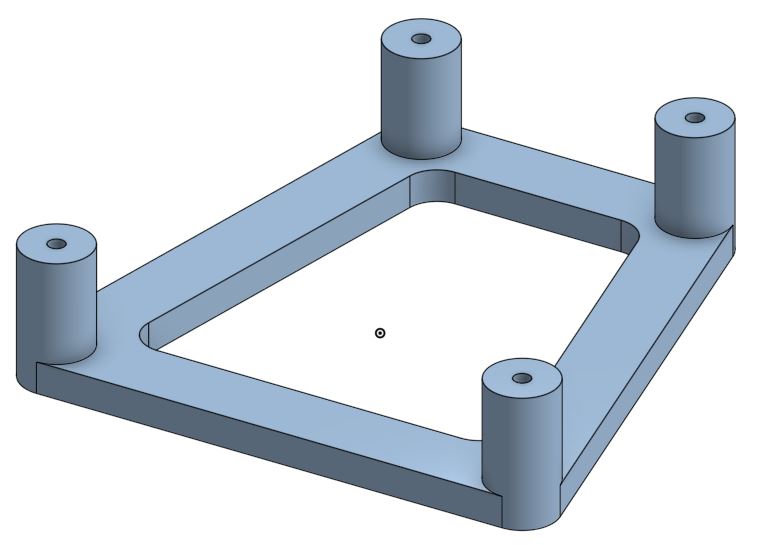
For wiring, I followed ExoMy’s lead and designed in a lot of wiring channels in the suspension arms, trying to keep wires tidy and out of sight all the way until they pass through narrow channels into the body. Not all of these efforts worked. Some channels were too narrow, making installation impossible. Some channels were too wide, and wires fell out. This was disappointing, but also completely expected. I’m learning how to design wire management channels, I wouldn’t get it all right the first time.
But these intricate pathways had another impact: these micro servos are built with approximately 25cm of wire (plus or minus a few centimeters) which would have been long enough for a little rover whose overall length is about the same. However, now that they have to wind their way back and forth inside suspension components, 25cm is no longer enough.
I had a similar problem with Sawppy V1, where the wires that came with LX-16A serial bus servos were not long enough for a rover. I cut those wires apart and spliced them into a custom wiring harness, but I’d like to avoid that kind of electrical work for building a little Sawppy. Fortunately, unlike LX-16As, micro servos use commodity remote control hobby servo plugs. Which means I could use commodity servo extension cables. (*) And no wire cutting or soldering iron would be required to make MSB1 wires fit inside its suspension geometry.
(*) Disclosure: As an Amazon Associate I earn from qualifying purchases.







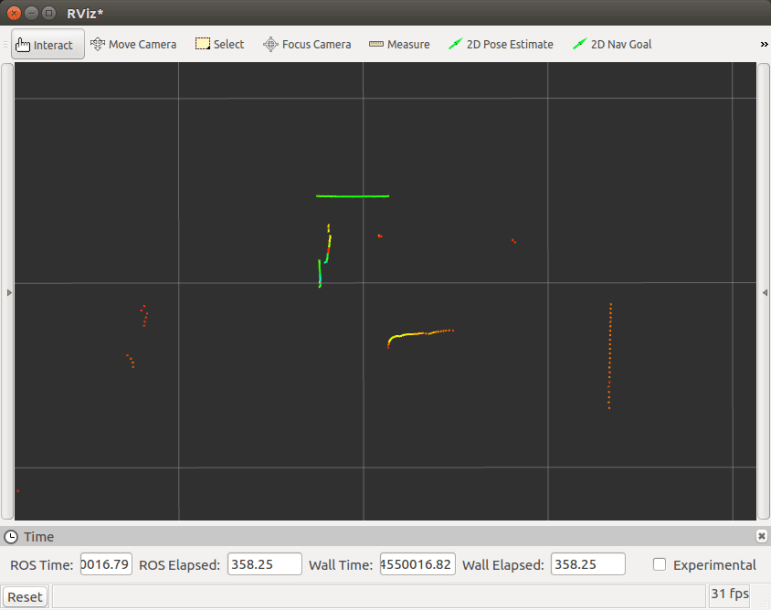
 I bought a laser scanner salvaged from a Neato robot vacuum
I bought a laser scanner salvaged from a Neato robot vacuum