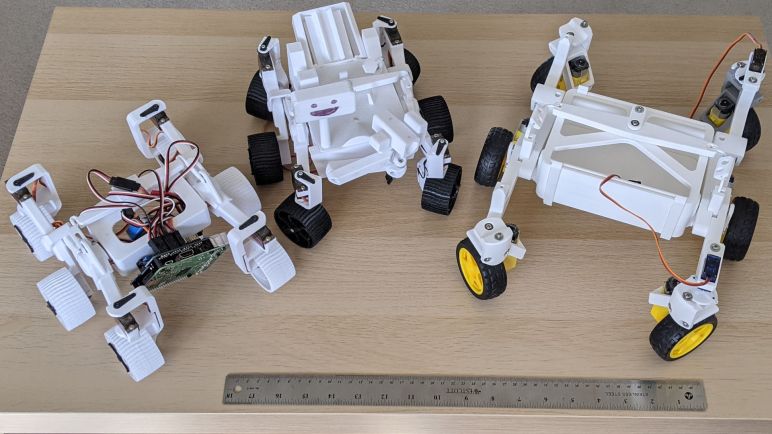
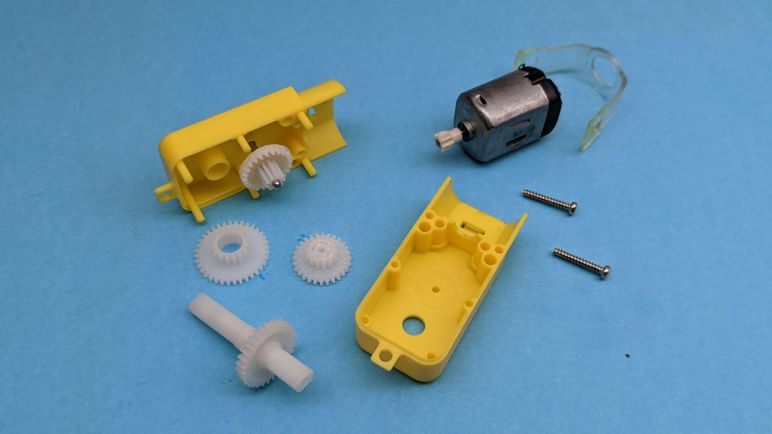
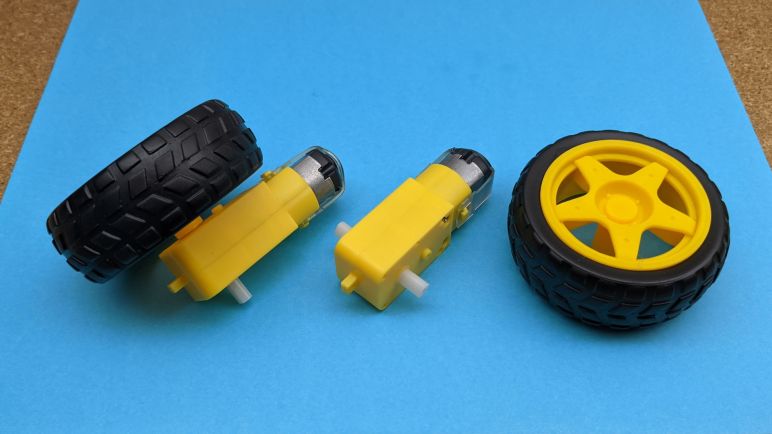
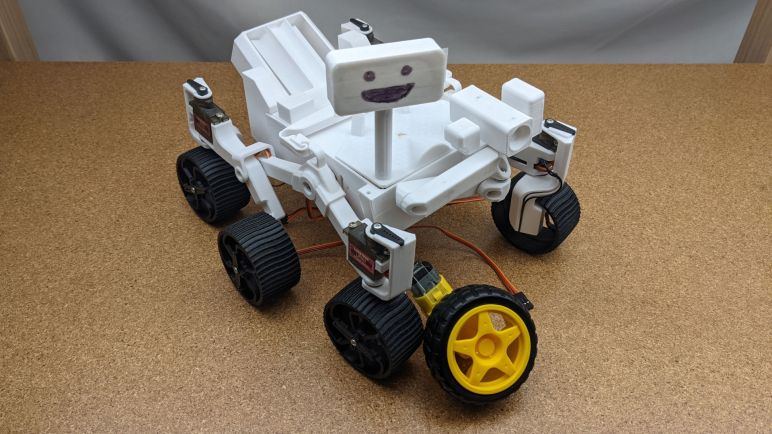
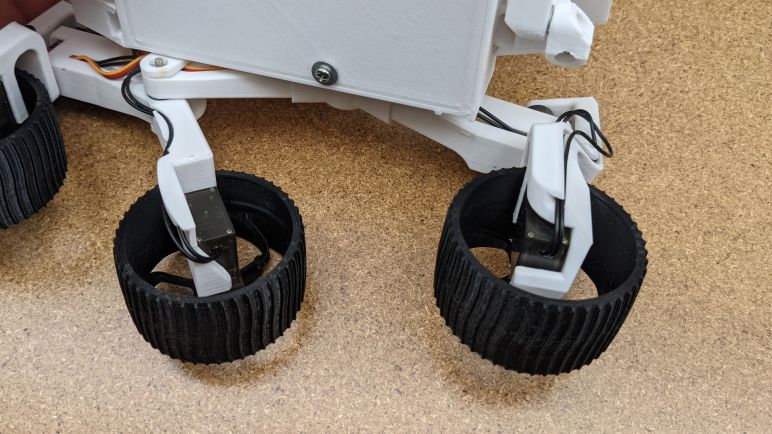
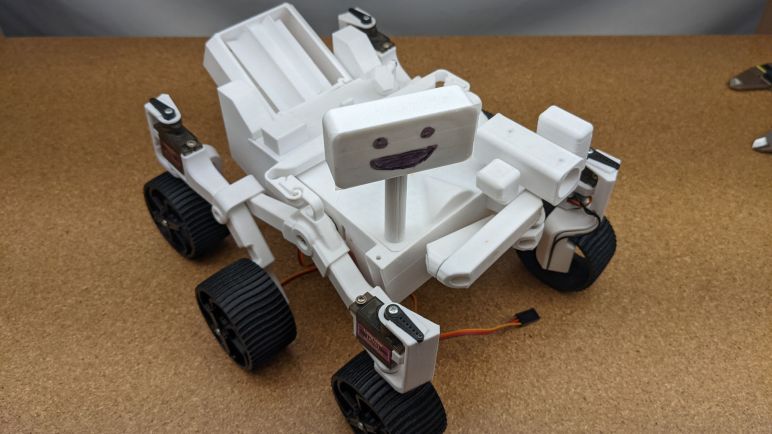
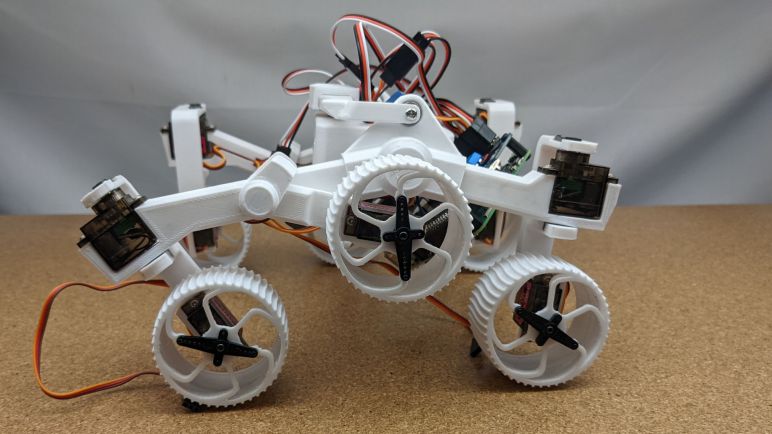
The third revision of my little rover prototypes, Micro Sawppy Beta 3 (MSB3), uses TT gear motors and matching wheels for the six-wheel-drive aspect of its rover suspension. Using commodity components solves a lot of problems, but now I have to integrate them. The starting point is a rectangular bracket that bolts onto two top mounting points of a TT gearbox, and angles over the wheel to a hole for a bearing that is aligned with where the wheel touches the ground. (“Contact patch”) This alignment is necessary in order for the wheel to pivot in place. If the rotational axis of the bearing is not aligned, then any rotation would drag the wheel across an arc instead of pivoting on the axis of rotation.
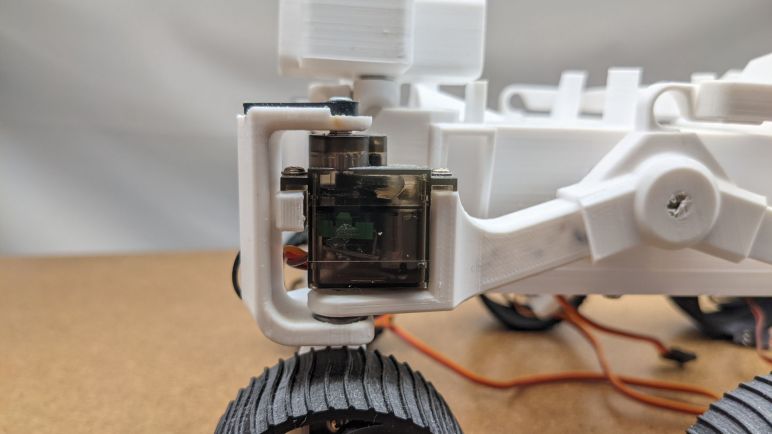
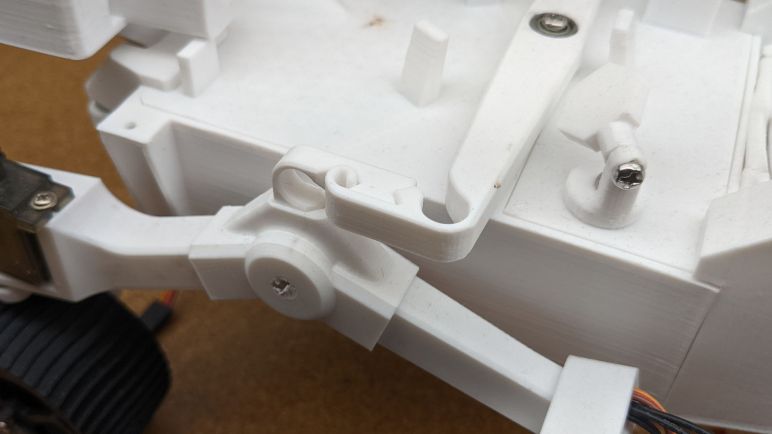
Sawppy V1 had the same steering axis alignment requirement, and I used 8mm shafts running through the center of 608 bearings. For MSB3 I’ve turned that design around: instead of transmitting the rotational force through the center of the bearing, now the bearing center remains static while steering forces are transmitted around it. M3 fasteners bolt a pair of bearings to the front end of the suspension rocker, one top and one bottom. The steering mechanism takes the general shape of a C holding above and below this pair of bearings.
MSB1 and MSB2 ran M3 screw through the center of bearings in their suspension members, but that used the M3 fastener as a rotational axle much like how Sawppy V1 used 8mm shafts. This meant the smoothness of the rotation is sensitive to how tightly the fastener was torqued down. Too loosely, and it rattles. Too tightly, and the fastener would cause the bearings to bind up. Which defeats the purpose of using ball bearings to begin with! I had a few other ideas on how to address these problems, but I decided to try this one first. Inverting the roles was less dependent on 3D printer precision and hence easier to build.
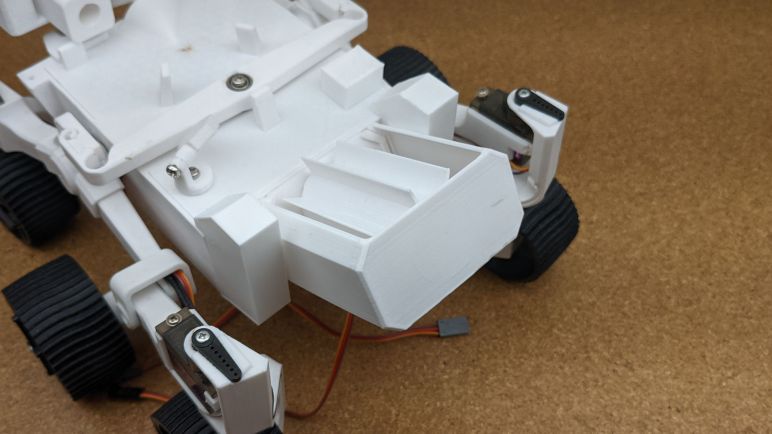
Part of making micro Sawppy easier to build is to avoid similar looking parts that are not interchangeable. For MSB3 I designed the two parts of this steering C-shaped assembly so it can be used on all four corners. That is to say, a builder will print four copies of the same design. Rather than Sawppy V1 which had distinct front-left, front-right, rear-left, and rear-right corner steering components people might (and did) inadvertently swap causing confusion. This is something I wanted to mitigate by stamping reference numbers on parts, but it’s better to design so the user doesn’t have to squint to make out part numbers at all.
In order to make a part usable in multiple directions, it is symmetric front-back as well as side-to-side. Adding provisions to allow the parts to be attached in multiple directions also added unnecessary bulk, and I haven’t made up my mind whether the tradeoff is worthwhile. Clever designers know how to design parts so they are clearly unambiguous, I might want to tackle that as a challenge instead. In the meantime I’ll leave this as-is and proceed to steering servo installation and associated adjustment.