With mechanical foundations established, it took a few weeks of experimentation to get to Micro Sawppy Beta 1. (MSB1) My first running test of a small Sawppy rover, this prototype verified I could make a rocker-bogie rover chassis using micro servos for all electromechanical articulation. It was also my first time veering away from mechanical scale fidelity, altering proportions towards a cute baby rover.
Since the focus was on rocker-bogie suspension design, I didn’t put much effort into the rover body for this chassis, it’s just a minimalist box. This follows the precedence of NASA JPL’s “Scarecrow” rover which was likewise a test chassis for Curiosity rover’s rocker-bogie suspension and has no body to speak of. It also has no onboard computer processing, and this lack of electronic brain is where its “Scarecrow” name came from.
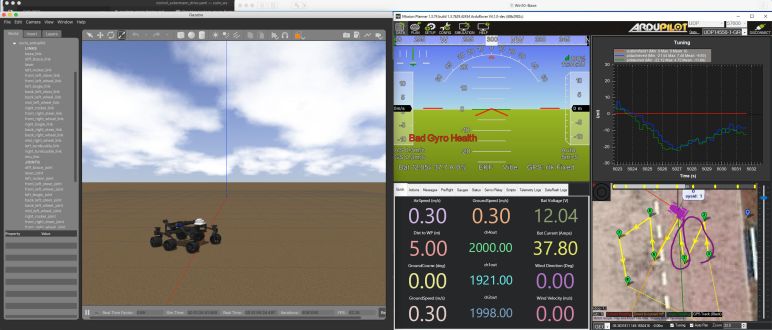
MSB1 similarly has no onboard autonomy, but that matches my Sawppy V1 rover which never got software beyond turning it into a remote control vehicle. In fact, like my Sawppy, MSB1 is also running the software I wrote for SGVHAK rover. Shortly before its public premiere, SGVHAK rover needed software support for a steering hack with remote control hobby servo, and I reused that code base for this micro servo rover. What was slapped together for a single steering servo was expanded to cover servo control for four steering servos and wheels driven by six continuous-rotation servos.
Using SGVHAK rover code, running on a Raspberry Pi 3 with the Adafruit 16-channel PWM/Servo HAT, was the most expedient way to get MSB1 up and running. Following ExoMy’s lead, I had put some effort into wire management, but the end result is a tangled mess because I made a miscalculation somewhere in the scarecrow body box for this rover. It was too small to hold a Pi 3 with the servo HAT, so those two circuit boards were forced to dangle outside the box and now everything is a mess. Ah well, that’s why we do prototypes.
So let’s take a little tour of MSB1 from the ground up, starting with its wheels.